- Galego
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
PMIC Explicado: Funcións, Tipos e Aplicacións
Catálogo
Explorando PMIC
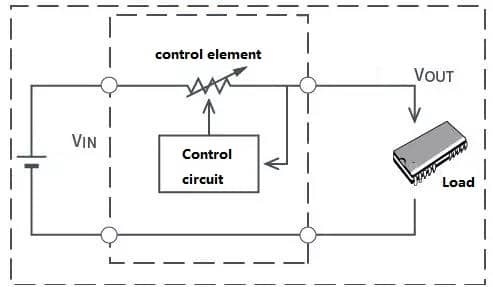
Un PMIC (Circuíto Integrado de Xestión de Enerxía) é un IC dedicado que acepta unha ou varias entradas de enerxía e produce múltiples liñas de enerxía reguladas e controladas para as diferentes cargas sobre unha placa. Esas cargas inclúen con frecuencia procesadores, memoria, seccións RF, sensores e periféricos diversos.
En vez de dispersar reguladores discretos e ICs de supervisión a través do deseño, un PMIC consolida estes en un único xestor de dominio de enerxía coordinado. Para moitos equipos, esta consolidación tamén aporta unha certa tranquilidade durante a posta en marcha, porque hai un único lugar onde mirar cando as liñas se comportan de maneira estraña.
Procesadores, memoria, bloques RF, sensores e outras cargas.
Alcance funcional
Nos produtos reais, a contribución dun PMIC vai moito máis alá da conversión de tensión. O beneficio práctico aparece cando se comporta como un coordinador de enerxía a nivel de sistema que atopa xuntas varias responsabilidades que interactúan de forma natural durante o arranque, pasos de carga en tempo de execución e condicións de fallos.
Conversión
Un PMIC pode combinar diferentes tipos de reguladores para que as liñas de enerxía centradas na eficiência e as liñas de enerxía sensibles ao ruído poidan ser optimizadas por separado. Nos deseños prácticos, a preocupación principal non é xerar a tensión requirida, senón manter unha tensión estable durante cambios de carga, eventos de arranque e outras condicións operativas difíciles.
Reguladores buck, reguladores boost, reguladores buck-boost e reguladores LDO.
Unha liña que parece limpa con carga estable pode volverse visiblemente estresada baixo perfís reais. A eficiencia, as ondulacións, a resposta transitoria e o márxe térmico son comúnmente examinados de cerca cando se proban as correntes de explosión do CPU, os pulsos de transmisión RF ou os picos de muestreo de sensores baixo condicións operativas reais.
Explosións do CPU, pulsos de transmisión RF e picos de muestreo de sensores.
Distribución
Despois de xerar as liñas, un PMIC a miúdo dicta como se comparten, conmutan e illan. Aquí é onde un deseño pode sentirse robusto ou frágil, especialmente durante eventos de conexión en quente, brownout e relacionados co cable. Cando a distribución se manexa de forma reflexiva, a corrente de entrada é controlada, os camiños de retroalimentación están contidos e unha falla é menos probable que cascada en un colapso a nivel de placa.
Habilitadores de liña, interruptores de carga, limitación de corrente e ORing de diodos ideais para entradas de múltiples fontes.
Detección e supervisión
A maioría dos PMIC intégran supervisores que observan continuamente a saúde das liñas e proporcionan sinais que o firmware e o hardware poden interpretar. Nun laboratorio, estas características rapidamente deixan de parecer agradables engadidos e comezan a parecer a diferenza entre unha sesión de depuración limpa e un día spentido a buscar un restablecemento que se nega a reproduciirse a demanda.
Monitores de baixas tensión, monitores de altas tensión, detección de sobrecorrente, detección térmica e sinalización de alimentación correcta.
Unha lección que tende a quedarlle aos equipos experimentados de desenvolvemento é que os limiares de alimentación correcta e a temporización de desactivación deben ser inequívocos. Cando son vagos ou mal adaptados ao sistema, o resultado é a miúdo restablecementos falsos ou fallos de arranque fantasma que aparecen só en condicións extremas de temperatura, en certas baterías, ou despois dunha secuencia de reinicios rápidos.
Control e secuenciación
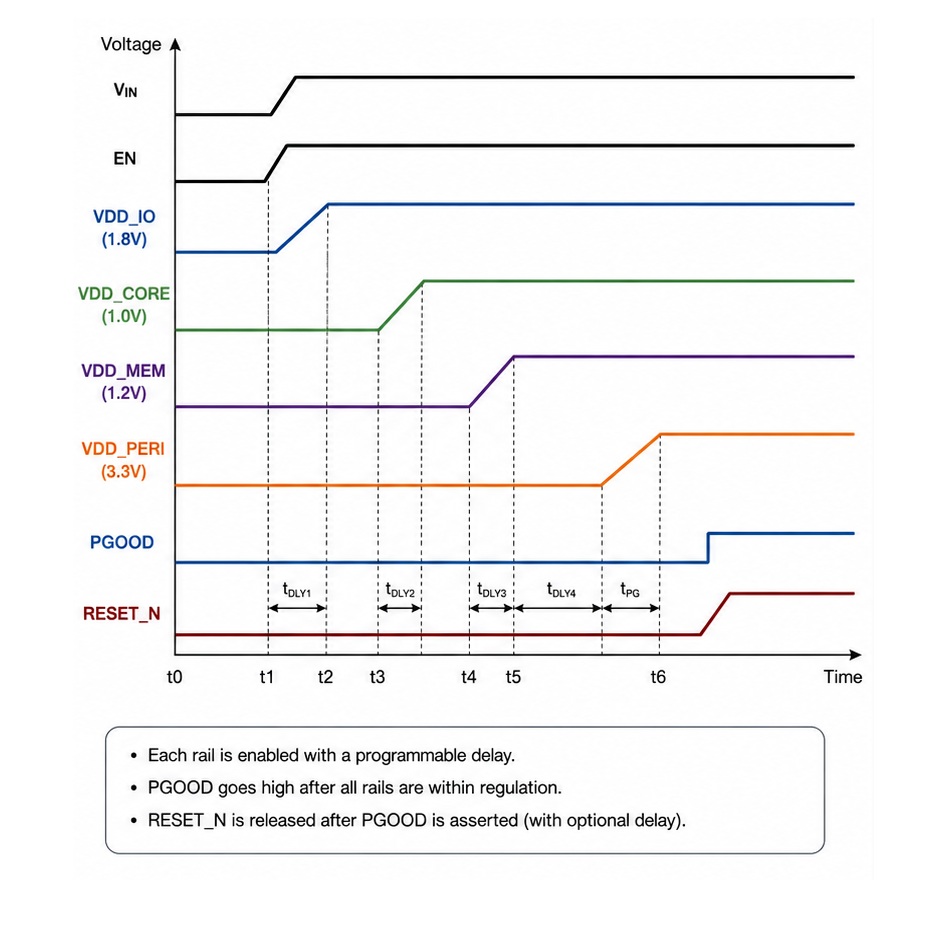
Un PMIC inclúe frecuentemente mecanismos para modelar como as tensións soben, baixan e coordinan entre si. Estes detalles matéranse como resultados concretos: se un sistema arranca de forma repetible, se os compoñentes sufren estrés evitable, e se a placa volve a un estado coñecido despois dun fallo.
Secuenciación, arranque suave, modelado de rampas, rutas de descarga e temporización de inter-railes configurable.
Un sistema dixital normalmente non só require voltaxes de estado estable correctas; tamén espera que esas tensións cheguen nun orde particular e dentro de relacións de tempo limitadas. Se as pendentes son demasiado pronunciadas, demasiado lentas, ou simplemente están mal ordenadas, as estruturas internas e os dominios poden acabar en condicións indefinidas que son intermitentemente molestas, especialmente arredor do comportamento de retención de SRAM e do arranque de interfaces de alta velocidade.
Estruturas internas de ESD, dominios de retención de SRAM e interfaces de alta velocidade.
O que tende a modelar resultados en deseños reais
Cando un equipo transita dun diagrama de bloques a un prototipo funcional, a selección e configuración do PMIC adoitan ter éxito ou fracasar en detalles operativos en vez de en especificacións a nivel de mercadotecnia. Os problemas sutiles son aqueles que crean presión no cronograma, porque surxen tarde e rara vez se presentan como unha única causa raíz obvia.
Enfrontarse a transitorios rápidos e cargas dinámicas
Os procesadores modernos e as seccións de RF poden demandar grandes pasos de corrente en escalas de tempo de microsegundos. Un PMIC pode parecer perfectamente aceptable sobre o papel e aínda mostrar caída, sobrepresión ou oscilación unha vez que o bucle de control, o enfoque de compensación, a rede de saída e os parásitos da PCB son forzados a interactuar no deseño real.
Caída, sobrepresión e oscilación.
Os equipos que testan a resposta transitoria desde cedo adoitan facelo porque tiveron a dor de descubrila tarde. A validación temperá pode reducir as probabilidades de un ciclo de rediseño incómodo que implique indutores, capacitores de saída, compoñentes de compensación, ou incluso a elección do propio PMIC.
Indutores, capacitores, compoñentes de compensación e o propio PMIC.
Secuenciación como un contrato do sistema, non como unha conveniencia
A secuenciación de alimentación funciona mellor cando se trata como un contrato entre os requisitos de silicio, as suposicións do firmware e o comportamento da placa. Cando as taxas de rampa e os tempos de alimentación correcta se desvían do que espera a folla de datos do procesador, ou do que supón implícitamente o firmware, tendemos a aparecer problemas intermitentes de arranque.
Requisitos da folla de datos do procesador e expectativas do firmware.
O que fai que estes problemas sexan especialmente frustrantes é a súa tendencia a desaparecer en condicións amigables de banco e volver durante extremos de temperatura, eventos de conexión rápida de batería, ou condicións de suministro marginais. Nestes ambientes, a secuenciación determinista e o comportamento de reinicio predecible redúcenos sorpresas e acurtan os ciclos de depuración.
Esquinas de temperatura, eventos de conexión rápida de batería e condicións semellantes a apagón.
Comportamento de protección como un palanca de tempo de actividade e custo de servizo
Os limites de sobrecorrente, a parada térmica e as proteccións de UV/OV adoitan discutirse na lingua da seguridade, pero os produtos implementados experimentan como características de disponibilidade. Un PMIC que limita a corrente de forma elegante, informa de fallos con suficiente claridade para ser accionable, e se recupera de maneira controlada pode evitar que un fallo menor de periféricos se convertan nun apagón do sistema completo e un ticket de soporte.
Mecanismos de protección: Protección contra sobrecorrente, parada térmica, protección contra baixa tensión e protección contra alta tensión.
Beneficios da fiabilidade do sistema: Limitación elegante da corrente, informe de fallos e recuperación controlada.
A miúdo é máis preciso, e francamente máis útil durante os compromisos de deseño, pensar no PMIC como parte da arquitectura de fiabilidade do sistema en vez de como un simple converteitor de potencia. Os deseños que envellecen ben tenden a seleccionar un PMIC en función de como aplica de forma consistente estados de potencia predecibles durante a operación normal, o tratamento de fallos e as transicións.
Cando se toma en serio esa perspectiva, os detalles que son fáciles de minimizar durante a planificación inicial comezan a lerse de maneira diferente durante a integración. O comportamento de descarga das tensións, a integridade da sinal de alimentación correcta e a telemetría de fallos convertense nas características que separan un dispositivo que simplemente se acende no laboratorio dun dispositivo que arranca de forma limpa, repetida e predecible no campo, sen pedir ao equipo de enxeñería que teña sorte.
Categorías de PMIC
Os PMICs prodúcense a miúdo cunha función principal, mais ao enviar hardware tenden a comportarse como un subsistema de alimentación compacto e coordinado en vez de como un compoñente de propósito único. Unha forma práctica de clasificar os tipos de PMIC é observar (a) que regulan, (b) que restrinxen ou impoñen, e (c) a que conectan, desconectan ou activamente conducen. Desde unha perspectiva de posta en marcha do sistema, a liña divisoria que sigue surfando é menos sobre linear fronte a conmutación e máis sobre se o PMIC foi construido para xestionar a interacción do rail ao rail baixo carga variable. Cando esa interacción se manexa de maneira reflexiva, as placas senten máis tranquilas durante as probas de estrés; cando non, o mesmo deseño pode parecer correcto nunha fonte de banco e volverse temperamental nun produto completamente montado.
Agrupacións Funcionais Principais
Estes bloques xeran rails, establecen puntos de operación e absorben cambios nas condicións de entrada. Típicamente cubren todo, desde rails silenciosos de baixa corrente ata dominios dixitais de alta corrente.
• Regulación linear (LDOs)
• Regulación por conmutación (buck, boost, buck-boost, invertindo, bombas de carga)
• Conversión de front-end e pre-regulación (adaptadores AC/DC, etapas de afundimento USB-PD, pre-reguladores automotivos en algunas plataformas)
Estes bloques moldean como se permite que a enerxía se comporte definindo límites, observando contornos e reaccionando a fallos. Es posible que non entreguen vatios, pero a miúdo deciden se un sistema falla de modo limpo ou falla de forma misteriosa.
• Referencias de voltaxe e bandgaps
• Supervisores, monitores e comparadores de ventana
• Xeneración de reinicio, temporizadores de vixía e detección de apagón
• Secuenciación, seguimento e resposta a fallos (UV/OV, sobrecorrente, resposta térmica)
Estes bloques determinan onde flúe a enerxía, cando está illada e como se conducen as cargas externas. Nos deseños reais, son onde os casos extremos, conexións en quente, caídas de cable, fallos de accesorios, tenden a saír á superficie primeiro.
• Xestión da ruta de alimentación
• Interruptores de carga e eFuses
• Carga de batería
• Rails e controladores relacionados co display
• Controladores de porta MOSFET
Tipos de Regulación/Conversión
Os LDOs elíxense habitualmente cando se desexa un baixo ruído de saída, un fluxo de deseño sinxelo e un comportamento rápido de sinal pequeno. Son frecuentes nos bloques RF, rails de audio, sensores de precisión e subministros relacionados con referencias ADC onde os picos de ondulación poden converterse en perdas de rendemento medibles.
A calor é a miúdo o factor limitante no rendemento do regulador. A medida que aumenta a diferenza de voltaxe de entrada a saída ou sobe a corrente de carga, a disipación de potencia e a temperatura poden volverse máis importantes que as especificacións de precisión eléctrica.
Un rail de potencia que parece estable durante probas en banco aberto pode desenvolver problemas significativos de calefacción dentro de sistemas pechados ou ambientes de alta temperatura onde o fluxo de aire e os marxes térmicos se reducen.
Os convertidores buck levan gran parte da carga de traballo para rails de núcleo eficientes: procesadores de aplicacións, DSPs, rails DDR e outros dominios dixitais de alta corrente. Na práctica, dúas placas que utilizan o mesmo buck poden comportarse de maneira moi diferente dependendo do modo de control, dos modos de operación a baixa carga e das parasitas impulsadas polo deseño.
• Enfoque de control (modo de voltaxe, modo de corrente, histerético, tempo de activación constante)
• Comportamento a baixa carga (PFM, omisión de pulso, PWM forzado)
• Resposta transitoria fronte a compensación de ondulación na saída
• Postura EMI (opcións de espectro estendido, eleccións de frecuencia de conmutación, sensibilidade do deseño)
Un detalle que tende a afiar as revisións de deseño é a realidade do perfil de carga. Un convertidor que parece excelente a 2 A pode pasar a maior parte da súa vida en 20–200 mA, onde as transiciones de modo, a perda de carga da porta e a sobrecarga de conmutación dominan. Comparar só os valores de eficiencia máxima pode levar a que a vida da batería en operación real sexa peor do que se esperaba a partir das estimacións iniciais.
Os convertidores boost aplícanse normalmente cando o rail de destino debe exceder a fonte; exemplos comúns inclúen xerar 5 V a partir dunha batería de celda única, crear rails de polarización para pantallas ou alimentar cadeas de LED. As topoloxías buck-boost son preferidas cando a entrada pode cruzar por encima e por debaixo da saída desexada, como manter un rail de sistema estable durante toda a curva de descarga da batería.
Estes convertidores a miúdo desenredan dores de cabeza a nivel de sistema, como manter estable un dominio de 5 V mentres a batería cae, pero ese alivio vén cunha maior complexidade en partes intermovibles: complexidade de compensación, comportamento do límite de corrente do interruptor e EMI conducida que pode ser sorprendentemente sensible á xeometría da placa e ás condicións do cable.
Nos teléfonos e en módulos IoT pequenos, o ladrón AC/DC está comunmente fóra do produto, mais a negociación de front-end e a protección de entrada cada vez máis caen dentro do dispositivo. Incluso cando un folletín comercializa estes como características de USB en vez de características de PMIC, moldean fortemente a dimensión dos convertidores a monte, a distribución de calor e o peor caso de estrés.
• Soporte para detección e negociación USB-PD
• Limitación de corrente de entrada e control de inrush
• Protección contra sobrevoltage para accesorios e adaptadores USB
Bloques de Soporte de Precisión
A precisión dos anclaxes de referencia para ADCs, DACs e limiares de comparadores. Nos produtos de sinal mixto, os detalles que importan repetidamente son o comportamento de deriva, a densidade de ruído e o PSRR a través do rango de frecuencia relevante. Pode parecer contraintuitivo, pero unha pequena cantidade de ruído de referencia pode aparecer como jitter medible, erro de sensor ou ambigüidade de limiar unha vez multiplicada por eleccións de gaño e filtrado do mundo real.
Os supervisores vixían os railes para violacións de baixa tensión, alta tensión e secuenciación. Nos sistemas de multi-railes, axudan a evitar estados a medio vivir onde un dominio se inicia e comeza a executar mentres outro dominio está atrasado, en brownout ou oscilando.
Desde unha perspectiva de fiabilidade, a monitorización robusta tende a reducir o tipo de devolucións intermitentes de campo que frustran a todos: problemas que aparecen só durante arranques en frío, lanzamentos con baixa batería, eventos rápidos de conector en quente, ou cables que estaban fóra do “camiño feliz” do laboratorio.
A secuenciación é máis que rail A e despois rail B. Convierte nunha discusión sobre pilas de tolerancia de tempo, pendentes de rampa, relacións de restablecemento e o que fai o sistema cando un rail falla a súa xanela.
A documentación do SoC especifica frecuentemente dependencias IO-before-core, restricións de adestramento de memoria e tempos precisos de desactivación de restablecemento. Os PMICs con secuenciación programable e rampas controladas poden reducir a lóxica de unión externa e facer que a posta en marcha se sinta menos como unha adiviñanza, especialmente cando as placas están iterando rápidamente e pequenos cambios de tempo poden aforrar días de depuración.
Funcións de Camiño de Potencia e Condución
A lóxica do camiño de potencia decide se o sistema funciona con USB, batería ou unha combinación de ambos, e influénciase no que acontece durante as transicións.
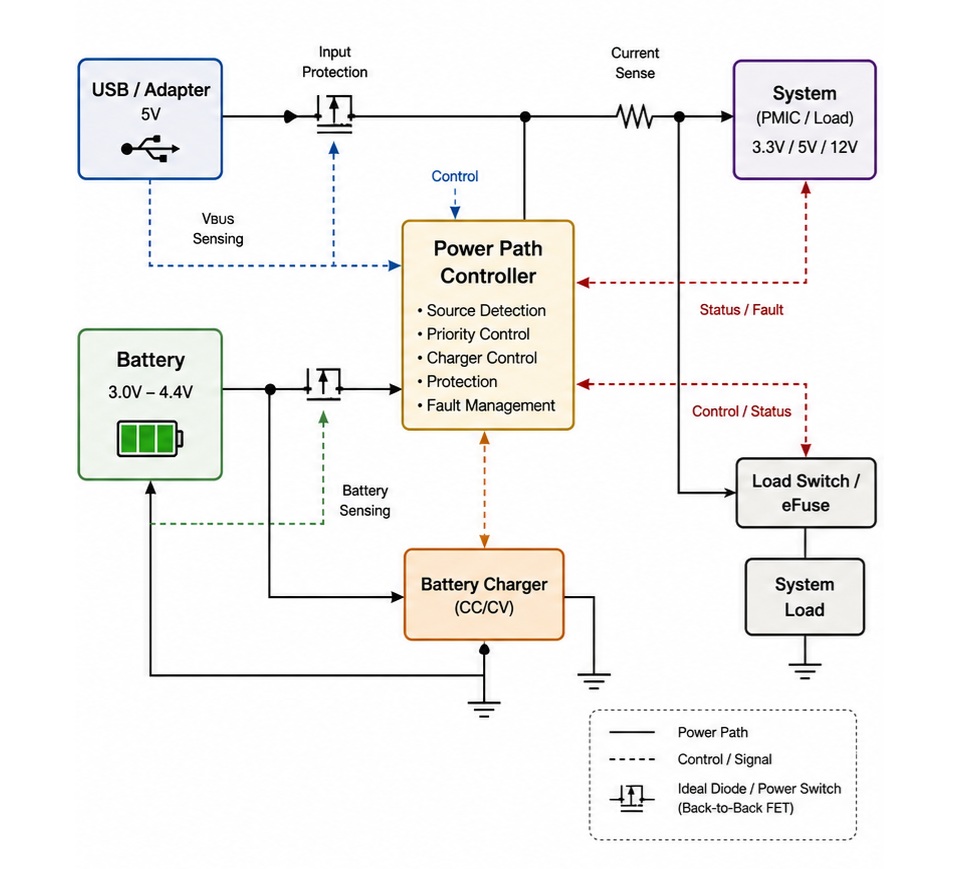
• Comportamento de conmutación sen costura (limitando as caídas que desencadean restablecementos)
• Limitación de corrente de entrada para adaptarse a USB/adaptadores e restricións de cumprimento
• Comportamento de diodo ideal para reducir a corrente inversa
Un trampa recurrente do mundo real é subestimar a resistencia nos cables, conectores e elementos de protección. Durante un tránsito rápido, o PMIC pode comportarse exactamente como foi deseñado e o sistema pode seguir en estado de brownout porque o camiño de arriba cae máis do que o modelo supuxo. Esas fallas senten “injustas” ata que a impedancia total do camiño é medida e tratada como parte do deseño, non como unha nota a pé de páxina.
Os cargadores varían no apoio á química da batería, na topoloxía do circuíto, nas características térmicas e nos obxectivos de deseño. As prioridades comúns inclúen carga máis rápida, menor temperatura superficial, menos EMI, ou manter o rendemento do sistema mentres se carga.
• Cargadores lineais
• Cargadores conmutados
• Modos power-bank/OTG
A selección a miúdo reduce ao orzamento térmico, restricións regulatorias ou de interoperabilidade, e se se espera que o dispositivo manteña un rendemento completo mentres se carga sen sentirse lento ou funcionando incómodamente quente.
Os interruptores de carga son comúnmente usados para controlar os railes para a redución de potencia en espera e para aislar dominios durante estados de falla ou envío. Os eFuses engaden límites de corrente programables, temporizadores de falla e comportamento de activación controlada.
En moitos produtos, estos bloques pagan a súa área de placa transformando modos de falla desordenados, cortocircuitos de conectores, erros de accesorios, eventos de enchufe incorrectos, en incidentes contidos en lugar de restablecementos en cascada ou danos físicos que son caros de diagnosticar e aínda máis difíciles de reproducir.
Os sistemas de visualización requiren frecuentemente múltiples railes de potencia como AVDD, VGH e VGL con secuenciación de arranque cuidadosamente controlada para evitar artefactos de visualización visibles. Os controladores de LED tamén deben regular a corrente de forma precisa e responder de forma fiable a fallos de cadena aberta e cortocircuitos porque estas condicións aparecen comúnmente durante a operación.
Os controladores de porta e os estádos de maior potencia tornanse cada vez máis relevantes na robótica, automoción e equipos industriais, onde o control do motor e a conversión de maior voltaxe intersecan coa coordinación tipo PMIC, telemetría e políticas de protección.
O “PMIC” Típico de Teléfono/IoT
En moitos teléfonos e módulos compactos de IoT, un PMIC cómpre entender como unha fusión deliberada de bloques máis que como unha única categoría. A integración normalmente busca reducir a área da PCB, simplificar a secuenciación e dar ao firmware un lugar único para observar e influír no comportamento da potencia.
• Múltiples convertidores rebaixados de alta eficiencia para CPU, GPU, memoria e railes sempre encendidos
• Un ou máis LDOs para railes analóxicos e RF de baixo ruído
• Circuitaría de cargador e camiño de potencia para coordinación USB e batería
• Monitores, secuenciadores, controles térmicos e informes de interrupción para telemetría e manexo de fallas
O que tende a dominar os resultados é a interacción das rail. Un buck transiente pode acoplarse a un RF LDO a través da impedancia de terra compartida. O recorte térmico do cargador pode diminuír silenciosamente a corrente do sistema dispoñible, e ese cambio pode arrastrar unha rail central ao caemento durante un pico de carga. Os deseños que evalúan cada bloque illadamente adoitan parecer limpos nas probas iniciais en banco e logo se volven complicados durante as probas de estrés integradas, cando todo está conmutando, quentando e negociando ao mesmo tempo.
Selección e Integración
Os reguladores de conmutación elíxense normalmente para reducir a disipación, aínda que poden introducir ondulación e EMI que se escapan a dominios sensibles. Os LDOs adoitan calmariar o ruído, pero o custe aparece como calor cando a marxe de tensión é xenerosa ou a corrente é non trivial.
• Reguladores de conmutación: maior eficiencia, máis traballo de xestión de ondulación/EMI
• LDOs: menor ruído, maior disipación de calor ao reducir a tensión
Un compromiso que frecuentemente funciona ben é usar un buck para crear unha rail intermedia, e logo usar un LDO para a rail final sensible, sempre que a marxe e o comportamento térmico foron planificados deliberadamente en vez de deixalos para despois doutras decisións.
Cambios de carga rápidos requiren bucles de control rápidos, un deseño de compensación adecuado e unha capacidade de saída suficiente para manter a regulación estable durante os primeiros microsegundos de resposta. A selección de capacitores implica máis que simplemente aumentar a capacitancia. A capacitancia efectiva pode diminuír debido a bias DC, cambios de temperatura e envelhecimento. A ESR e a ESL tamén afectan á estabilidade do circuito, á resposta transitoria e ao rendemento de EMI, o que as converte en consideracións de deseño importantes.
Os equipos que validan co dieléctrico exacto do capacitor, a clasificación de voltaxe e o tamaño do caso destinados para a produción tendensen a evitar sorpresas de estabilidade na fase final, especialmente cando as cadeas de subministro forzan substitucións equivalentes que son só equivalentes sobre o papel.
O comportamento do PMIC ante fallos pode deseñarse arredor de diferentes filosofías. Un enfoque tenta unha degradación graciosa, a manexe de caídas de tensión, indicios de limitación ao procesador, desprendemento selectivo das rails, para que o sistema siga sendo utilizável en modo reducido. Otro enfoque impón un apagado determinista para alcanzar un estado seguro coñecido rapidamente.
• Degradación graciosa: a miúdo alineada cos obxectivos da experiencia do usuario en produtos de consumo
• Apagado determinista: a miúdo alineado cun comportamento previsible en deseños orientados á seguridade
O PMIC que se adapta mellor adoita ser aquel cuxo secuenciación e respostas ante fallos coinciden co comportamento destinado do produto, non aquel que casualmente publicita a lista de verificacions máis longa.
As frecuencias de conmutación máis altas e as etapas de potencia de banda ampla están aumentando a densidade de potencia alcanzable, pero tamén crean requisitos de disposición de PCB máis estrictos e maior sensibilidade a EMI. Ao mesmo tempo, as funcións de software como telemetría, interrupcións, funcións de rexistro e políticas de control programables están converténdose en factores importantes na xestión e integración do sistema de potencia en xeral.
Os PMIC que manteñen un comportamento de potencia previsible baixo cargas reais poden reducir considerablemente o tempo de depuración, especialmente en sistemas que xestionan radios, procesadores, operacións de carga e límites térmicos simultaneamente.
Ámbito de Aplicación do PMIC
Os PMIC aparecen en calquera lugar onde a enerxía eléctrica ten que ser convertida, distribuída, secuenciada, observada e protexida mentres se manteñen as perdas e a interferencia baixo control. Utilízanse rutinariamente en deseños de consumo, empresariais, automotivos e industriais, aínda que a liña divisoria normalmente non é o mercado final, senón como se ve realmente o árbol de potencia na práctica. O momento en que un produto contén múltiples rails con diferentes tolerancias ao ruído, diferente comportamento ante cargas de paso e diferentes expectativas de fallos, o PMIC deixa de sentirse como unha "elección de pezas" e comeza a actuar como unha forza modeladora no comportamento do sistema. En moitos deseños reais, unha vez que un procesador de alto rendemento se emparexa con radios, sensores, memoria e E/S de alta velocidade, a arquitectura de potencia acaba limitando o que a plataforma pode proporcionar consistentemente, mesmo cando o cálculo e o software parecen sólidos no papel.
Onde o Comportamento do PMIC Limita os Resultados do Sistema no Mundo Real
Resposta a Transitorios de Carga que Silenciosamente Establecen o Teito
Os CPUs e GPUs modernos xeran pasos de corrente abruptos durante a actividade de aumento e estalido, e eses pasos poden ser sorprendentemente implacables. Cando o bucle de control do PMIC, a capacitancia de saída e a impedancia de distribución non poden manter a rail dentro de límites estreitos, os equipos de software adoitan responder de maneiras que son sutís pero custosas: acortan as xanxas de aumento, reducen os reloxs máximos ou inseren bandas de protección máis amplas para que os fallos non aparezan no campo. Desde un punto de vista de enxeñería, ese intercambio pode sentirse frustrante porque a plataforma pode parecer eficiente mentres segue deixando o rendemento sobre a mesa baixo tráfico realista.
As equipas que só validan con cargas estáticas ou patróns de laboratorio ordenados adoitan aprender isto tarde. As cargas de traballo reais crean bordes irregulares: os bursts curtos de xogo, os picos de inferencia de IA e os eventos de co-existencia de radio poden producir caídas de tensión que nunca apareceron cando a raíl foi exercida cun perfil de banco benigno. A lección incómoda é que un comportamento transitorio repetible baixo cargas de traballo desordenadas a miúdo proporciona un rendemento máis útil que perseguir un número de eficiencia favorábel en un único punto de operación.
Ondulación e ruído de banda ancha que se converte en débeda de integridade de sinal
A ondulación non debe ser tratada só como un parámetro de rendimiento analóxico. Os harmónicos de conmutación e o ruído de banda ancha poden afectar á resolución do ADC, aumentar o ruído de fase RF, e reducir o marges de sinal SERDES, especialmente cando os raís de alimentación comparten rutas de retorno ou se acoplan a través da inductancia do paquete e do PCB. Un raíl de alimentación que parece limpo en probas de raíl único pode comportarse de maneira moi diferente en interfaces de alta velocidade, antenas ou secciones de memoria densas.
As realidades do deseño tamén cambian a historia. As limitacións mecánicas e as zonas de exclusión obriguen a compromisos, e eses compromisos poden amplificar as rutas de acoplamento que eran invisibles nun deseño ideal. Na práctica, unha solución de potencia gaña confianza cando permanece estable e silenciosa baixo unha colocación imperfeita e un enrutamento non ideal, non só cando se mide nunha configuración de demostración de mellor caso.
Inicio e secuenciación que configuran os resultados de fiabilidade
O orde de encendido e o comportamento de rampa deciden se a formación da memoria completa de forma consistente, se as radios se calibran sen fallos estraños nas esquinas, e se os dominios sempre activos permanecen estables durante as caídas de tensión. A secuenciación marginal a miúdo produce o tipo de patrón de fallo que drena tempo e moral: “un de cincuenta arranques”, difícil de reproducir, e aínda máis difícil de depurar unha vez que o sistema está completamente integrado.
A secuenciación tende a funcionar mellor cando se maneixa como parte do comportamento de restablecemento e recuperación en lugar de como unha lista de verificación tardía. Os deseños que se mantienen en produción normalmente tratan o camiño completo de encendido/apagado como unha máquina de estados repetible, logo demostran isto baixo taxas de rampa de peor caso, temperatura fría e condicións de baixa batería. O ciclo automático de potencia é a miúdo onde se gaña confianza, porque expón os bordes intermitentes que uns poucos cambios manuales de potencia nunca revelan.
Criterios de selección como espazo de intercambio do sistema
Eficiencia avaliada a través dos modos, non como un número trofeo
A eficiencia cambia de significado dependendo de como o produto realmente gasta o seu tempo. A eficiencia en carga máxima pode parecer impresionante nas especificacións, pero a vida útil real da batería e o rendimiento térmico dependen de moitas condicións de operación, incluíndo o procesamento en ráfaga, carga normal, carga lixeira e operación en sono profundo. As perdas de conmutación, as perdas de condución e a corrente de quiescencia compiten de maneira diferente en cada rexión, e o "vencedor" muda co perfil de carga de traballo.
Para os deseños alimentados por batería, a baixa Iq e a forte eficiencia en carga lixeira adoitan aparecer directamente como un tempo máis longo entre cargas, que aos equipos de produto lles preocupa dunha maneira moi concreta. Para servidores e equipos de rede, as perdas de condución e as limitacións térmicas adoitan dominar porque a corrente sostida e a eliminación do calor convertense na realidade diaria. Unha forma concreta de decidir é mapear os obxectivos de eficiencia á distribución temporal das cargas de traballo, en lugar de optimizar un punto de operación que case nunca se produce no campo.
Margen térmico que evita que o rendimiento colapse baixo o calor
Os límites térmicos definen frecuentemente a corrente máxima sustentable, que á súa vez define o cálculo sustentable máximo. Un PMIC pode parecer eléctricamente excelente e, con todo, perder obxectivos do sistema se o seu paquete, cobre e colocación crean puntos quentes locais cerca da memoria, latas de blindaxe, ou bloques RF sensibles á temperatura. En montaxes reais, pequenos aumentos de temperatura poden activar comportamentos de redución, limiares de protección, ou preocupacións de fiabilidade a longo prazo que ninguén quere explicar despois do lanzamento.
Os deseños que envellecen ben adoitan planear para o folgado térmico. Esa planificación adoita manifestarse como características térmicas do paquete que se ajustan á carga, capacidade multipaso cando o perfil de corrente xustifícalo, e unha estratexia de deseño que dispersa o calor mentres mantén os lazos de corrente suficientemente curtos para evitar converter as correccións térmicas en problemas de ruído.
Restricións de EMI que inflan o custo do horario e da iteración
A frecuencia de conmutación, as taxas de borde e a topoloxía de control inflúen fortemente en se a EMI se pode tratar con filtrado directo ou se se converte en un ciclo de rotación de placas e sesións de laboratorio a altas horas da noite. A conformidade coa folla de datos é só parte da historia; a sensibilidade do deseño pode dominar os resultados. unha solución que exixe xeometría de bucle case perfecta pode converterse en un xogo de azar cando as limitacións mecánicas forzan unha colocación incómoda.
Moitas escuadras terminan preferindo unha solución lixeiramente máis lenta e controlable, cunha taxa de cambio xestionable e un comportamento espectral predecible, porque reduce o tempo de depuración e diminúe o risco de certificación. Esa elección pode parecer conservadora, pero a miúdo alínea coa realidade de que os problemas de EMI tendem a aparecer tarde, cando o cronograma é menos indulgente.
Características de Protección que Definen a Experiencia de Fallo e Comportamento do Servizo
O comportamento de protección afecta fortemente a resposta do sistema durante condicións de fallo. As configuracións de OCP, OVP, OTP e protección contra cortocircuitos poden determinar se o sistema realiza un apagado limpo, entra en modo de bloqueo ou reinicia repetidamente cun comportamento inestable. Estas respostas afectan directamente a dificultade de solución de problemas, os requisitos de soporte e a percepción xeral da fiabilidade do produto.
As configuracións de protección tamén interaccionan con eventos de operación normal. A limitación agresiva de corrente pode reducir o risco de danos, pero tamén pode activar reinicios repetidos durante momentos de gran corrente de arranque ou picos de inicio. O manexo de fallos normalmente funciona mellor cando se axusta como parte da estratexia de servizo pretendida, decidindo que debe volver a intentar, que debe bloquearse, que debe rexistrarse e que debe fallar rapidamente, en lugar de deixarse como valores de rexistro predeterminados.
Custo de Integración que Inclúe Firmware, Validación e Realidade de Depuración
O custo de integración raramente se detén na lista de materiais e na área da placa de circuíto impreso. Inclúe traballo de firmware, alcance de validación, tempo de proba, robustez de fabricación e a carga de depuración cando algo non se comporta como se esperaba. Os PMICs altamente integrados poden reducir o número de compoñentes, o cal é atractivo, pero tamén concentran o risco: un cambio tardío nunha liña pode provocar a requalificación dunha porción maior do árbore de potencia do que o equipo planeou.
Enfoques máis discretos poden aumentar o esforzo de disposición e a xestión de pezas, pero poden ofrecer modularidade e unha substitución máis fácil se as condicións da cadea de subministro cambian ou se esperan actualizacións a medio prazo. A lente de selección máis honesta é o apetite de risco do programa: sensibilidade ao cronograma, número de iteracións esperadas e con que frecuencia é probable que o deseño se revise despois do primeiro lanzamento.
Características de Potencia Dixital: Flexibilidade que Vén con Condicións Adxuntas
Telemetría, liñas programables e escalado dinámico de tensión poden traer vantaxes reais: optimización de potencia máis axustada, diagnósticos de fallos máis claros e escalado de rendemento adaptativo que segue a carga de traballo e a temperatura. Ao mesmo tempo, estas características requiren dependencia de firmware, control de configuración, disciplina de programación de produción e modos de fallo completamente novos que non existen en configuracións analóxicas máis sinxelas. A telemetría só se volve valiosa cando os datos recollidos se usan activamente para a monitorización e decisións de deseño en lugar de permanecer sen usar en taboleiros de diagnóstico.
Desde un punto de vista práctico, a potencia dixital gaña a súa validez cando pecha un lazo medible. Se a programabilidade pode empregarse para recuperar a rendibilidade, ampliar a vida da batería ou previr a limitación térmica cunas políticas controladas, convértese nunha palanca poderosa. Se se activa simplemente porque está dispoñible, a miúdo convértese nunha superficie de configuración non utilizada que complica a validación, incrementa o risco de mala configuración na fabricación e crea ambigüidade sobre que configuracións son realmente pretendidas.
Un Fluído Práctico de Selección e Validación que Rexeita Comportamento do Sistema
Un fluxo de traballo que tende a resistir a presión parte dos obxectivos de comportamento do sistema en lugar de escanear un catálogo de PMIC e esperar que a partida funcione máis adiante. Divide o problema en fragmentos concretos e testables e forza a claridade sobre o que significa un bo comportamento antes da activación da placa.
• Convierte os transitorios de carga de traballo en requisitos de liña (caída permitida, tempo de asentamento, corrente máxima, taxa de repetición).
• Define orzamentos de ruído para bloques sensibles (ADC, PLL, SERDES, RF) e mapealos a límites de ondulación e supostos de disposición.
• Especifica a secuenciación, as dependencias de reinicio e a recuperación de subalimentación como unha máquina de estados.
• Avalía o risco de EMI desde cedo utilizando restriccións de colocación realistas e o enfoque de blindaxe pretendido.
• Valida o comportamento de protección mediante inxección de fallos que se asemellan a cortocircuitos reais, eventos de cable e descensos de batería.
ADC / PLL / SERDES / RF
Este estilo de enfoque reduce sorpresas na fase tardía porque trata o PMIC como o mecanismo que xestiona o comportamento de potencia a nivel de sistema, non como un utilitario de fondo. Cando a potencia está deseñada como un subsistema de primeira categoría, o rendemento se volve máis consistente, a fiabilidade é máis fácil de defender con datos, e o traballo de cumprimento tende a ser máis predecible, mentres que o equipo pasa menos tempo perseguindo fallos intermitentes que orixinan nas liñas en lugar de na lógica ou no software.
Direcións Futuras para PMICs
A maior densidade de potencia e menores tensións de núcleo deixan os PMICs regulando cunha cabeza eléctrica máis apertada e menos tolerancia ao retraso. A medida que as raias de subministro se sitúan máis cerca do punto mínimo de operación dunha carga dixital, mesmo un descenso modesto pode aparecer como erros suaves, reinicios ou limitación do rendemento que se sente "misterioso" durante o arranque do sistema. Isto desplaza gradualmente a atención do proxecto desde que tan precisa parece unha ringleira no estado estable e cara a como se comporta durante os eventos de carga rápida e de peor caso.
Os equipos adoitan encontrar unha realidade incómoda: un bucle que parece calmo na banca pode comportarse mal no produto unha vez que cargas reais creen pasos de carga agudos, puntos quentes localizados e compartición non uniforme da corrente de fase. Un patrón máis resistente é tratar o deseño do bucle, as eleccións da etapa de potencia e a impedancia do PDN como un único sistema acoplado, e logo verificar o comportamento usando as sinaturas de carga representativas en lugar de pulsos limpos e idealizados.
Transitorios máis rápidos naturalmente atraen os deseños cara a bucles máis apertados, pero os bucles máis apertados tamén fan que os deseños estean máis expostos á indutancia parasitaria, apilamentos de tolerancia e ruído de detección que é fácil subestimar no inicio. En moitos programas, a diferencia entre estable e estable no campo provén da mellora do modelado de sinais pequenos, detección de corrente creíble e compensación que está afinada con conciencia do real despregue.
Aumentar a frecuencia de conmutación pode axudar, pero non se traduce automaticamente en mellor comportamento transitorio se a ruta de detección e a geometría da PCB non poden soportar o ancho de banda adicional. Cando sucede esa descompensación, a ganancia do bucle gástase amplificando o ruído, o que pode aparecer como conmutación agitada, artefactos audibles en certos modos de operación, ou picos de EMI que só aparecen tras a integración mecánica.
Os bloques modernos de computación e conectividade xeran unha demanda que é presentada e composicional, así que a validación transitoria cada vez espella máis o que realmente fan o software e as radios en lugar do que unha caixa de carga pode aproximar cun único paso.
Moitos equipos converxen nun fluxo de traballo que combina:
• Paso de carga de laboratorio
• Registros de telemetría da plataforma
• Actualizacións iterativas das eleccións de compensación e desacoplamento.
Este enfoque tende a reducir sorpresas na etapa tardía, especialmente cando os límites térmicos reformulan lentamente o comportamento eléctrico e cambian os marxes co tempo.
A presión para reducir o tamaño mentres se mellora o rendemento está estendendo a integración no paquete e na estrutura circundante, non só no chip. O embalaxe avanzada e os pasivos integrados poden acurtar bucles de alta di/dt, reducir parasitas e apertar a resposta transitoria de xeitos que se senten inmediatamente medibles durante a depuración. Os magnéticos integrados poden elevar aínda máis a densidade de potencia, pero o beneficio adoita estar restrinxido por rutas térmicas, restricións mecánicas e como cambia o acoplamento unha vez que o deseño está dentro da súa verdadeira envoltura.
Nos produtos implementados, os ganhos máis duradeiros da integración provén frecuentemente da redución da sensibilidade á variación de construción e da estabilización do rendemento a través da dispersión da fabricación, en lugar de simplemente cortar a factura dos materiais.
A selección do paquete reflite cada vez máis os resultados eléctricos e térmicos, incluíndo unha menor indutancia do bucle, mellor distribución do calor e un control de impedancia máis predecible. Una lección común no campo é que dúas placas que comparten o mesmo esquema poden divergir de xeito agudo no comportamento cando un deseño preserva un bucle de corrente compacto e o outro dispersa a ruta de potencia a través da PCB.
A medida que aumenta a integración do sistema, a planificación do despregue adoita ser priorizada anteriormente no desenvolvemento porque os cambios en compoñentes máis tarde non sempre poden corrixir problemas causados por mala geometría ou rotulación da PCB.
Os magnéticos integrados poden aumentar a eficiencia a frecuencias máis altas e reducir a altura z, o que é atractivo en produtos empaquetados de xeito compacto. Ao mesmo tempo, poden introducir novas rutas de acoplamento e crear puntos quentes térmicos que son difíciles de detectar ata etapas tardías de prototipos. Os deseños que avanzan sen problemas habitualmente tratan o indutor e o paquete como un tema de co-deseño de EMI e térmico combinado, incluíndo decisións de colocación próximas a antenas, enlaces de alta velocidade e sensores sensibles.
A práctica de EMI está tendendo a afastarse de mitigacións puramente estáticas e cara a estratexias de control que anticipan as condicións de operación. Técnicas como a modulación por espectro estendido, conducción de compuerta máis intelixente e detección on-chip máis rica poden reducir picos, pero tamén requiren coordinación para evitar simplemente intercambiar emisións picos por ruído de banda ancha ou interferencia de radio.
Moitos equipos viron como a secuencia se desenrola: as comprobacións de EMI iniciais pasan, logo as construcións posteriores fallan cando múltiples reguladores conmutan en patróns correlacionados, cando unha nova programación de firmware cambia o tempo de carga, ou cando cables e blindaxes desvían as rutas de retorno. Estas experiencias empuxan o pensamento sobre EMI cara arriba a nivel de plataforma en lugar de tratar cada regulador como un caixa illada.
A medida que os bordos de conmutación se fan máis rápidos, o control dv/dt inflúe cada vez máis tanto nas emisións como no estrés a longo prazo. Os controladores de porta están engadindo máis programabilidade, e a lógica de protección está a converterse en máis consciente do contexto, o que pode facer que a sintonía se sinta máis como enxeñaría de sistemas que como selección de compoñentes.
Un hábito práctico que aforra tempo é sintonizar as taxas de conmutación usando medicións tomadas na configuración mecánica final, porque o blindaxe, os arneses e as estruturas de terra cambian a miúdo o resultado EMI de formas que unha placa sen blindaxe non revela.
A mellora na detección no chip permite comportamentos adaptativos como cambiar o comportamento de conmutación cando as emisións se achegan a un límite ou cando cambia o modo de funcionamento. Co tempo, isto empuxa os PMICs lonxe do comportamento de función fixa e cara a subsistemas xestionados que negocian continuamente o rendemento, o ruído e as condicións térmicas en función dos datos de retroalimentación en vez de supostos.
Os sistemas alimentados por batería seguen a perseguir unha corrente de quiescente ultra-baixa e unha forte eficiencia a carga lixeira usando técnicas como a operación PFM/burst, a emulación de diodos e a selección automática de modo. A tensión emocional que moitos equipos recoñecen é que os mesmos modos de carga lixeira que parecen magníficos nunha ficha técnica poden introducir ondas, artefactos audibles ou firmas EMI intermitentes que se notan inmediatamente mesmo se a eficiencia media parece excelente.
Para reducir a ambigüidade, os equipos definen cada vez máis o que significa un comportamento de espera aceptable en termos concretos, e elixen unha estratexia de modo para axustarse.
Os obxectivos especificados comúnmente inclúen:
• Limites de onda en sono/espera
• Latencia de espertar
• Restricións acústicas/sonoras
• Comportamento EMI durante a actividade periódica de mantemento.
Na práctica, a vida da batería baixo ciclos de funcionamento realistas a miúdo conta a historia de maneira máis fiable que as cifras de eficiencia máxima, especialmente cando o ciclo de funcionamento inclúe sono, espertar periódico, picos de radio e muestreo de sensores.
O cambio automático de modo é atractivo, pero as transicións poden crear disturbios breves que desaparecen nas medicións medias e só se mostran como reinicios raros ou queixas de ruído intermitente. Os deseños que se sienten "sólidos" no campo adoitan dedicar un esforzo adicional de validación precisamente nas liñas fronteirizas entre PFM e PWM, incluíndo a secuenciación de espertar, os retrasos de secuenciación e os pasos de carga nas condicións de fronteira.
Un patrón repetido é que a configuración de eficiencia máis agresiva non sempre é a opción de produto máis cómoda cando produce ondas que varían coas condicións ou acoplamento de ruído que é difícil de reproducir. Moitos equipos acaban elixindo unha configuración que renuncia a unha pequena cantidade de eficiencia a cambio dun comportamento que é repetible a través da temperatura, a variación de construción e os escenarios, o que a miúdo reduce o risco de integración e reduce o desgaste de soporte.
A medida que as plataformas de computación escalan, dependen cada vez máis de telemetría precisa, escalado de tensión adaptativo e protección que está coordinada a través de moitas liñas. A telemetría exerce un papel práctico na enxeñaría diario: pode acortar a posta en marcha, acelerar o análisis de causas raíz e reducir a tentación de sobreproducir "por si acaso" ao revelar onde realmente se atopa o marxe.
A telemetría tende a ser máis importante cando as condicións cambian rapidamente, non cando a liña é estable e fácil de medir. Os futuros PMICs probablemente melloren o comportamento de muestreo, as opcións de filtrado e a alineación temporal para que as decisións de software sigan a realidade máis de cerca.
Un matiz que os equipos experimentados tendem a apreciar é que máis mostras non son automaticamente máis útiles; a consistencia, a estabilidade da calibración a través da temperatura e as claras definicións de ancho de banda e latencia a miúdo deciden se os datos se poden actuar de forma segura.
Con máis liñas xorde unha necesidade máis intensa de comportamento de protección coordinado para que o sistema responda de forma coherente en lugar de liña por liña.
A coordinación da protección adoita abranguer:
• Comportamento de resposta OCP
• Comportamento de resposta OVP
• Comportamento de resposta UVP
• Comportamento de resposta OTP
• Dependencias de secuenciación
• Políticas de recuperación de fallos
• Compartición de estado entre PMICs
Os sistemas reais fallen con frecuencia non porque falte unha característica, senón porque as liñas responden de maneira diferente ao mesmo evento, produciendo cascadas de caída de tensión ou ciclos de reinicio que son frustrantes de diagnosticar. Un enfoque coordinado de manexo de fallos, estado compartido máis un plan unificado de recuperación, coincide mellor co que se espera que as plataformas fagan baixo estrés.
A adopción de GaN e SiC crecerá en áreas onde a frecuencia de conmutación e a eficiencia cambian materialmente o tamaño ou o rendemento. A conmutación máis rápida pode reducir os elementos magnéticos e agudizar a resposta transitoria, pero tamén incrementa o estrés relacionado co dv/dt, a sensibilidade EMI e as esixencias sobre o deseño do conduxo de portas e a estratexia de ilamento. As limitacións non son puramente eléctricas; tamén implican límites operativos en función da variación da fabricación e os escenarios de uso incorrecto do mundo real que os equipos aprenderon a tomar en serio.
As solucións de GaN e SiC tenden a recompensar un control preciso do conduxo de portas, un deseño disciplinado e esquemas de protección que evitan o exceso de disparo, o zumbido e a activación non intencionada. Unha visión práctica que aparece repetidamente é que a calidade do deseño pode dominar a selección do dispositivo; un deseño ben executado cun dispositivo "modesto" pode superar a un dispositivo premium colocado nunha lazo inductivo e ruidoso.
A medida que aumentan as velocidades de conmutación, as opcións de ilamento e os límites de fiabilidade a longo prazo tornan-se máis prominentes nas revisións de deseño e na planificación da cualificación. A adopción acelérase normalmente onde os beneficios de rendemento xustifican claramente un rigor adicional no deseño, mentres que os produtos sensibles ao custo ou á xente sensible ao ruído móvese con maior cautela e exixen probas máis claras do beneficio a nivel de sistema.
Os PMIC están cada vez máis modelados para comportarse como executores de políticas que arbitran a eficiencia, o ruído, a térmica e a fiabilidade en tempo real. As arquitecturas que tenden a envellecer ben tratan a potencia como un recurso xestionado: a telemetría do PMIC informa á política de software, e a política de software á súa vez axusta os modos de operación do PMIC e o comportamento do rail. Isto borra a liña entre a propiedade de hardware e firmware dunha maneira que pode resultar incómoda ao principio, pero que a miúdo paga o seu peche ao reducir o apilamento de marxes e mellorar a resistencia baixo cargas reais.
Conclusión
A protección efectiva do circuíto depende de algo máis que engadir unha única peza de protección. Os deseños fiables requieren a correcta coordinación entre a desvío de picos, o acoplamento de tensión, o limitador de corrente, a conexión a terra, o deseño e o tempo de falla. Cada dispositivo de protección ten os seus propios puntos fortes e límites, polo que a selección debe coincidir co tipo de falla esperada, o nivel de enerxía, a velocidade de resposta e o ambiente operativo. Unha estratexia de protección ben planificada mellora a seguridade, reduce o risco de falla e apoia a fiabilidade a longo prazo en sistemas electrónicos do mundo real.
Preguntas Frecuentes (FAQ)
1. Por que se considera que un PMIC é un coordinador de potencia a nivel de sistema en lugar de simplemente un regulador de tensión?
Un PMIC fai moito máis que converter unha tensión en outra. Xestiona como se xeran, secuencian, monitorizan, distribúen e protexen múltiples rails en todo o sistema. Nos deseños prácticos, o PMIC coordina os rails do procesador, os subministros de memoria, as seccións RF, os sensores e os dominios periféricos mentres tamén maneja o tempo de arranque, a recuperación de fallos, os eventos térmicos e a sinalización de potencia boa. Debido a que todos estes comportamentos interactúan durante o arranque e a operación en tempo de execución, o PMIC converteuse a miúdo nun dos principais factores que modelan a fiabilidade e a estabilidade do sistema.
2. Por que as fallas relacionadas co PMIC a miúdo aparecen só baixo cargas reais en lugar de durante probas de laboratorio simples?
As probas de banco con cargas estáticas rara vez reproducen o rápido comportamento transitorio xenerado por procesadores modernos, transmisores RF, tráfico de memoria e explosións de sensores. Baixo condicións operativas realistas, os rails experimentan picos de corrente súbita que expón debilidades na resposta transitoria, nas parasíticas do PCB, no sintonizado de compensación e na estabilidade da rede de saída. Un PMIC pode parecer estable durante probas controladas, pero despois mostra caída, exceso de disparo, zumbido ou fallas de secuenciación unha vez que as cargas reais crean unha demanda eléctrica que cambia rapidamente.
3. Por que se trata a secuenciación de potencia como un contrato a nivel de sistema en lugar de unha simple función de arranque?
Moitos sistemas dixitais requiren relacións de tempo específicas entre rails do núcleo, rails de memoria, subministros de E/S, sinais de reinicio e dominios de sempre activos. Se os rails aumentan na ordem incorrecta ou con un tempo incorrecto, os procesadores, os bloques de retención de SRAM e as interfaces de alta velocidade poden entrar en estados de operación indefinidos. Estes problemas a miúdo crean fallas intermitentes de arranque que aparecen só durante extremos de temperatura, apagóns ou condicións de conexión en quente da batería. A secuenciación adecuada, polo tanto, convírtese nun acordo coordinado entre os requisitos de hardware, firmware e silicio en lugar de ser unha función de conveniencia.
4. Por que a resposta transitoria do PMIC pode limitar silenciosamente o rendimiento do mundo real dos CPUs e GPUs?
Os procesadores modernos xeran pasos de corrente bruscos durante a operación de aumento, cargas de traballo de IA, explosión de xogos e actividade radioeléctrica. Se o PMIC non pode manter unha tensión estable durante estes eventos, o firmware pode reducir a duración do aumento, baixar a velocidade do reloxo ou ampliar os marxes de tempo para evitar fallos. En moitos produtos, as limitacións na entrega de potencia limitan silenciosamente o rendemento sostido a pesar de que o procesador en si parece capaz sobre o papel. A resposta transitoria estable ten a miúdo máis influencia no rendemento do sistema usable que as especificacións de eficiencia máxima por si soas.
5. Por que o ruído de ondulación e conmutación dos PMICs crea problemas moito máis alá do subsistema de potencia en si?
Os harmónicos de conmutación e o ruído de banda ancha poden acoplarse en circuítos de RF, referencias de ADC, PLLs, enlaces SERDES e camiños analóxicos sensibles a través da impedancia de terra compartida e os parasíticos da PCB. Mesmo niveis de ondulación relativamente pequenos poden reducir a precisión do ADC, aumentar o ruído de fase, estreitar o marxe de tempo ou degradar a fiabilidade da comunicación de alta velocidade. Un raíl que parece eléctricamente aceptable en illamento pode crear graves problemas de integridade da sinal unha vez integrado en sistemas mesturados de sinal densos.
6. Por que as limitacións térmicas dos PMIC definen con frecuencia o máximo rendemento computacional sostido?
A medida que a temperatura do PMIC aumenta, a eficiencia diminúe e os mecanismos de protección térmica poden comezar a reducir a corrente dispoñible ou acadar un comportamento de retroceso. En sistemas compactos, puntos quentes localizados cerca de procesadores, memoria ou seccións de RF poden forzar o PMIC a unha redución térmica moito antes de que se acaden os límites eléctricos teóricos. Debido a isto, o rendemento sustentable do sistema depende a miúdo tanto do deseño térmico, da expansión de cobre e da selección de embalaxes como das especificacións do regulador en si.
7. Por que os enxeñeiros combinan con frecuencia convertidores de buck con reguladores LDO en deseños sensibles?
Os convertidores de buck proporcionan unha redución de tensión eficiente para raíl de alta corrente, pero introducen ondulación de conmutación e EMI. Os LDO xeran unha tensión de saída moito máis limpa cun ruído menor, pero disipan máis calor ao reducir voltaxes maiores. Un compromiso común utiliza un convertidor de buck para xerar un raíl intermedio de forma eficiente, seguido por un LDO para limpar o subministro final analóxico ou RF sensible. Esta combinación equilibra a eficiencia, a xestión térmica e a redución de ruído de forma máis efectiva que confiar só en calquera das topoloxías.
8. Por que as políticas de resposta a fallos dos PMIC son consideradas parte da experiencia global do produto?
O comportamento ante fallos determina se o produto se apaga de forma limpa, entra nun bucle de reinicio, reducindo a velocidade de forma elegante, ou se volve inestable durante condicións anormais. A protección contra sobrecorrente, o apagado térmico, o manexo de subvoltaxe e o tempo de recuperación inflúen directamente na experiencia con fallos de batería, problemas de cables ou eventos de sobrecarga. Unas políticas de PMIC ben deseñadas aillan os fallos de maneira predecible e recuperan de formas controladas, reducindo a complexidade de servizo e impedindo que problemas menores escalen a fallos de sistema completos.
9. Por que os modernos PMICs confían cada vez máis na telemetría e nas políticas de potencia programables?
Os sistemas modernos cambian dinámicamente a carga de traballo, o estado térmico, a actividade radioeléctrica e o comportamento de carga en tempo real. A telemetría do PMIC permite que o firmware monitoree continuamente as condicións dos raís, o consumo de corrente, a temperatura e os eventos de fallo. Estes datos permiten a escalación adaptativa da tensión, a xestión térmica, a estrangulación intelixente e decisións de protección coordinadas. Con todo, os sistemas de potencia programables tamén introducen nova complexidade de validación porque unha configuración incorrecta do firmware pode crear fallos que non existen nos deseños analóxicos fixos.
10. Por que os deseños futuros de PMIC se están moveando cara á “orquestración de potencia” en vez de unha simple conversión de potencia?
Os futuros PMICs esperan cada vez máis coordinar a eficiencia, a térmica, o comportamento EMI, a protección, a escalación de carga de traballo, as políticas de carga e a telemetría do sistema simultaneamente. As tecnoloxías de conmutación máis rápidas, os marxes de tensión máis esixentes e as cargas de traballo altamente dinámicas fan que o PMIC teña que adaptar continuamente o seu comportamento en función das condicións operativas reais en vez de suposicións estáticas. Esta evolución converte o PMIC nun subsistema de xestión activa que traballa en estreita colaboración co firmware e co software do sistema para manter unha operación estable, eficiente e predecible da plataforma en condicións cambiantes.
Blog relacionado
-
Cantos ceros nun millón de millóns de euros?
![Cantos ceros nun millón de millóns de euros?]()
2024/07/29
O millón representa 106, unha figura facilmente comprensiva en comparación con elementos cotiáns ou salarios anuais. Miles de millóns, equivalente... -
Follada de datos Mosfet IRLZ44N, circuíto, equivalente, pinout
![Follada de datos Mosfet IRLZ44N, circuíto, equivalente, pinout]()
2024/08/28
O IRLZ44N é un MOSFET de potencia de canle N moi usado.Coñecido polas súas excelentes capacidades de conmutación, é moi adecuado para numerosas a... -
A temperatura da batería demasiado baixa, a carga parou.Como solucionalo?
![A temperatura da batería demasiado baixa, a carga parou.Como solucionalo?]()
2024/10/6
Os problemas de carga da batería do teléfono móbil son comúns pero pódense xestionar de xeito eficaz.A temperatura xoga un papel importante na ef... -
Guía completa do transistor BC547
![Guía completa do transistor BC547]()
2024/07/4
O transistor BC547 úsase habitualmente nunha variedade de aplicacións electrónicas, que van desde amplificadores de sinal básicos ata circuítos d... -
Guía completa para SCR (rectificador controlado por silicio)
![Guía completa para SCR (rectificador controlado por silicio)]()
2024/04/22
Os rectificadores controlados por silicio (SCR), ou tiristores, xogan un papel fundamental na tecnoloxía de electrónica de poder debido ao seu rende... -
LR621, SR621SW, 364, AG1 Equivalentes e substitucións da batería AG1
![LR621, SR621SW, 364, AG1 Equivalentes e substitucións da batería AG1]()
2024/07/15
As baterías de botóns LR621 e SR621SW prevalecen en dispositivos electrónicos compactos como reloxos, xoguetes pequenos, calculadoras e teclas remo... -
Fundamentos dos circuítos op-amplificadores
![Fundamentos dos circuítos op-amplificadores]()
2023/12/28
No complexo mundo da electrónica, unha viaxe aos seus misterios invariablemente lévanos a un caleidoscopio de compoñentes do circuíto, tanto exqui... -
Unha guía completa para os multiplexores e o seu papel nos sistemas dixitais
![Unha guía completa para os multiplexores e o seu papel nos sistemas dixitais]()
2025/09/20
Os multiplexores son compoñentes en sistemas dixitais, deseñados para canalizar múltiples sinais de entrada nunha única liña de saída mediante s... -
Comparando diferenzas e aplicacións NMOS e PMO
![Comparando diferenzas e aplicacións NMOS e PMO]()
2024/11/15
Comprender as diferenzas entre os transistores NMOS e PMOS é importante no deseño de circuítos eficientes.NMOs (N-Type Metal-óxido-semiconductor) ... -
CR2450 VS CR2032 Comparación: todo o que necesitas saber
![CR2450 VS CR2032 Comparación: todo o que necesitas saber]()
2025/09/15
As baterías de botóns como CR2450 e CR2032 alimentan moitos electrónicos cotiáns, desde reloxos e remotos ata dispositivos médicos e industriais....




Partes quentes
- 12105C682MAT2A
- THS6184PWPRG4
- PM200DHA120
- NJM2137V
- GRM0336S1E5R0CD01D
- MAX4141CSD
- MAX785CAI-T
- TAJR334K020RNJ
- CM1204-03CS
- M29W640FB70ZA6
- 901-9881-RFX
- 18121A202JAT2A
- GRM1555C2A2R2CA01D
- GRM1885C2A180FA01J
- VI-R6002-CWVW
- ADG1612BRUZ-REEL
- LM324NSR
- GRM1885C2A6R7DA01D
- 06035C152MAT7A
- XCVU095-1FFVA2104I
- BQ24113ARHLR
- OPA549MKVC
- SN74AUP1G97DCKR
- MSP430F2131IPWR
- AC0805JRNPO0BN221
- EPM3064ATC44-10
- C1005C0G1H1R8C
- CC0402JRNPO9BN181
- SKKL92/18E
- EPF8143S-RC
- T491X336M035AT
- 18122C154JAT2A
- VI-J04-CX/F1
- 1812CC104KAT1A
- MP600BUCG-D
- 0402YC272KAT2A
- 1812CC183KAT1A
- 1206GA470KATME
- VE-J02-MY
- T491C107M010ZTAU00
- HPMP-1032AG
- ISPLSI2096-125LQ
- MSD318QT-LF-Z1
- MB86391PFV-GBNDE1
- C9902-TLM
- GRM155R71C224K
- HM658512ALFP-10
- ZL264-10DG
- MCP1502T-30E/CHY
- PEF22624EV2X S LLJ8