- Galego
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Sensores táctiles na robótica: funcións, tipos, evolución e aplicacións
Catálogo
Funcións principais dos sensores táctiles
Os sensores táctiles xeralmente enténdense a través de dous roles estreitamente ligados: detección e recoñecemento. A detección ocupa a primeira capa de información relacionada co toque, mentres que o recoñecemento amplía esa información cara a unha interpretación estructurada. Conxuntamente, definen como un sistema sente o contacto, interpreta a interacción física e apoia as decisións de control posteriores.
Detección: A Primeira Capa da Percepción Táctil
A detección concirne á adquisición directa de sinais relacionados co contacto. Nesta etapa, o sistema determina se ocorreu contacto e recolle información física medible a partir desa interacción.
O contido típico da detección inclúe:
• ocorrencia de contacto
• magnitude da forza aplicada
• posición do contacto
• comportamento de movemento ou deslizamento
• características relacionadas coa superficie como a rigidez, textura e aspereza
A primeira vista, isto pode parecer unha tarefa de detección sinxela. Non obstante, en contornos de enxeñería reais, a detección rara vez é tan limpa. Un sensor pode responder rapidamente pero xerar saídas inestables, e ese tipo de inconsistencia a miúdo crea máis frustración que unha redución moderada na sensibilidade. O que normalmente gaña confianza na práctica non é a responsividade exagerada, senón o comportamento repetible en condicións reais de contacto.
A detección forma a primeira conexión entre a interacción física e a interpretación máquina. Cando un sistema robótico toca un obxecto, o primeiro paso é converter o contacto mecánico en sinais eléctricos que poidan medirse e procesarse.
Este proceso a miúdo inclúe:
• detección da magnitude da forza
• mapeo da distribución da presión
• localización do contacto
• seguimento de eventos dinámicos
Se comeza a haber deslizamento, agárdase que o sensor rexistre cambios sutís relacionados coa fricción antes de que o obxecto escape realmente do control. Se a superficie en contacto é irregular, o proceso de detección debe separar protuberancias illadas de texturas continuas e distinguir ambas de estruturas de dureza máis amplas. Na implementación real, os sistemas que funcionan ben non son simplemente aqueles que recollen máis variables; son aqueles que capturan as variables máis relevantes cun nivel de precisión que realmente serve á tarefa.
Na etapa de detección, os sensores táctiles xeralmente capturan varios tipos de información física:
Estes inclúen comúnmente:
• existencia de contacto
• forza de contacto
• localización do contacto
• movemento e deslizamento
• propiedades da superficie como rigidez, conformabilidade e aspereza
A existencia de contacto é a sinal máis básico, pero ten un valor práctico substancial na iniciación do agarre e nas respostas relacionadas coa seguridade. A forza de contacto indica se a interacción se mantén suave, controlada ou excesiva. A localización do contacto revela como se distribúe a carga na rexión de detección. O movemento e o deslizamento expoñen se o obxecto permanece seguro ou comeza a moverse en relación á superficie do sensor. As propiedades da superficie engaden outra capa de xulgamento, ofrecendo pistas sobre a condición do material e como deben manexarse o obxecto con cautela.
En entornos aplicados, as sinalizacións brutas de detección raramente aparecen en forma limpa ou completa. A vibración menor, a carga desigual, a deriva de temperatura e os ángulos de contacto cambiantes distorsionan frecuentemente a saída.
As fontes comúns de disturbance na sinalización inclúen:
• pequena vibración mecánica
• carga desigual
• deriva de temperatura
• cambio no ángulo de contacto
Durante a manipulación repetida, incluso dous contactos aplicados con case a mesma forza poden producir curvas de resposta lixeiramente diferentes. Esta é unha observación familiar e ás veces frustrante no traballo táctil, especialmente cando as expectativas de laboratorio se atopan coa variabilidade física. Por esa razón, a detección fiable non depende só da sensibilidade do hardware, senón tamén da estratexia de calibración e da interpretación consciente do tempo. Nos moitos casos, a detección constante en condicións defectuosas aporta máis valor práctico que a sensibilidade ideal que se demostra só en experimentos controlados.
Reconocemento: Interpretación Táctil de Máis Alto Nivel
O recoñecemento constrúese a partir da detección transformando as sinais táctiles brutas en coñecemento significativo sobre o obxecto contactado. Neste estirpe, o sistema vai máis alá de preguntar que aconteceu no punto de contacto e comeza a preguntar que tipo de obxecto se está tocando, que características físicas presenta e que resposta debería seguir.
O recoñecemento pode involucrar:
• identificación de forma
• estimación de tamaño
• avaliación de dureza
• interpretación do patrón de contacto
• análise da estrutura de bordes
• avaliación da condición do agarre
Esta transición da medición física á interpretación estruturada permite que a detección táctil apoie a manipulación intelixente en vez de simply reportar eventos de contacto. É tamén a etapa onde o xulgamento enxeñeiral se fai máis visible, porque a interpretación debe seguir estando baseada en sinais que a menudo son incompletos, ruidosos e dependentes do contexto.
O recoñecemento require que o sistema organice a información detectada en patrones asociados coas características coñecidas do obxecto. Á área de contacto ampla combinada cunha baixa presión local pode indicar un obxecto suave ou cumprimido. Un patrón de forza concentrada acompañado de micro-deslizamento pode sinalar unha superficie ríxida baixo un agarre insuficiente. As distribucións espaciais repetidas poden revelar ademais bordes, esquinas ou xeometría curva.
Os sinais de recoñecemento posibles inclúen:
• área de contacto ampla con baixa presión
• forza concentrada con micro-deslizamento
• patrones espaciais de presión repetidos
Neste sentido, o recoñecemento táctil vai máis alá da simple clasificación. Reflicte unha lectura contextual da interacción ao longo do tempo. Os sistemas máis fiables tendentes a interpretar o contacto como un evento en desenvolvemento en vez de como unha única medida conxelada, que é a miúdo unha forma máis honesta de tratar co feito de como se desenvolve realmente o contacto físico.
A calidade do recoñecemento está fortemente modelada pola calidade da detección anterior. Se a localización do contacto non é precisa, a inferencia da forma convértese en inestable. Se as medicións de forza varían, a estimación da dureza pode resultar enganosa.
As limitacións comúns na parte superior inclúen:
• localización do contacto inexacta
• deriva da medición da forza
• datos inestables de distribución da presión
• resposta temporal inconsistente
Debido a esta dependencia, o recoñecemento enténdese mellor como o resultado dunha canalización de detección en capas en vez de como un paso final illado. Na práctica de desenvolvemento, non é inusual ver que a actuación na clasificación parece impresionante na avaliación de laboratorio e logo se amole durante o manexo real, onde a orientación do obxecto, a velocidade de agarre e a contaminación da superficie alteran a sinal. Ese intervalo pode ser decepcionante, pero tamén ofrece un recordatorio técnico sobrio: o rendemento depende non só da sofisticación algorítmica, senón tamén de como a datos reflictan verdadeiramente as condicións de contacto reais.
Canle de Procesamento en Sistemas Táctiles Prácticos
Nos sistemas táctiles prácticos, a detección e o recoñecemento están vinculados a través dunha cadea de procesamento de sinais estruturada. O sensor produce primeiro saídas analóxicas que reflexan a interacción mecánica. Estas saídas son logo condicionadas para mellorar a calidade da sinal e reducir a distorsión. Despois da conversión de analóxico a dixital, o filtrado suprime o ruído ao tempo que preserva patróns útiles. A extracción de características identifica compoñentes informativas, e os algoritmos de clasificación ou inferencia mapean esas compoñentes a atributos de obxecto ou estados de contacto.
Unha secuencia típica de procesamento inclúe:
• xeración de sinal analóxico
• condicionamento de sinal
• conversión de analóxico a dixital
• filtrado
• extracción de características
• clasificación ou inferencia
Esta secuencia pode parecer ordeada sobre o papel, pero cada etapa influénciase en que a próxima etapa pode “ver”. Unha vez que a información útil é debilitada ou eliminada demasiado cedo, os algoritmos posteriores teñen pouca oportunidade de recuperala.
O condicionamento de sinal utilízase porque as saídas táctiles en bruto son a miúdo débiles, nonlinear ou vulnerables a interferencias.
As operacións de condicionamento máis comúns inclúen:
• amplificación
• adaptación de impedancia
• corrección de base
Estas operacións preparan a sinal para a análise posterior. A conversión de analóxico a dixital determina entón con que fidelidade se captura o evento de toque continuo en forma dixital. Se o muestreo é demasiado lento, a variación relacionada co deslizamento pode pasar desapercibida. Se a cuantificación é demasiado groseira, diferenzas sutís relacionadas coa textura poden desaparecer. O bo deseño do sistema depende, polo tanto, de alinear os parámetros de procesamento electrónico co comportamento mecánico que se está observando, o que a miúdo require máis contención e axuste do que os deseños de primeira vez tenden a anticipar.
O filtrado fai máis que eliminar ruído non desexado; dá forma directamente aos límites perceptuais do sistema. Un filtrado excesivo pode borrar patróns transitorios asociados a un deslizamento inicial ou contacto texturizado. Un filtrado insuficiente pode permitir que o ruído se disfraze como un evento significativo.
Exemplos típicos de características inclúen:
• desplazamento do centróide de presión
• pendente forza-tempo
• variancia local
• sinatura no dominio da frecuencia
A mesma tensión aparece na extracción de características. As características efectivas preservan a relevancia física ao tempo que reducen a complexidade innecesaria. Nos sistemas operativos, as características interpretables demostran ser especialmente útiles, porque permiten aos enxeñeiros rastrexar casos de fallos, refinar o comportamento de control e evitar a incómoda situación na que un modelo produce respostas que parecen precisas pero que permanecen difíciles de explicar.
Unha vez extraídas as características, os algoritmos de clasificación asignan significado ao evento de contacto.
Estes algoritmos poden ser utilizados para:
• distinguir categorías de obxectos
• estimar a clase de material
• detectar agarre estable contra deslizamento
• identificar patróns de contacto recorrentes
Aínda así, a clasificación non debería ser tratada como un concurso estreito de precisión de referencia. Un modelo con unha precisión medida lixeiramente inferior pode desempeñar mellor durante a implementación se xeraliza de maneira máis fiable e responde de forma máis predecible baixo deriva do sensor ou variación ambiental. Desde un punto de vista a nivel de sistema, a intelixencia táctil confiable a miúdo constrúese a través dun manexo disciplinado da incerteza en lugar de mediante un axuste agresivo a conxuntos de datos idealizados.
Relación entre Detección e Recoñecemento
A detección e o recoñecemento son a miúdo descritos como funcións separadas, pero na práctica permanecen profundamente interdependentes. A detección proporciona a estrutura medible do toque, mentres que o recoñecemento dá a esa estrutura un significado operativo. Se a detección falta precisión, o recoñecemento volvése frágil. Se o recoñecemento está ausente, a detección permanece descriptiva sen ofrecer suficiente dirección para a acción. Por esa razón, os sistemas táctiles efectivos son normalmente deseñados con hardware de detección, procesamento de sinais e lóxica de decisión en deliberada alineación co tarefa de manipulación prevista.
Durante o agarre robótico, a detección pode primeiro confirmar contacto e medir a distribución da forza. O recoñecemento logo interpreta se o obxecto é suave, ríxido, está deslizándose, está centrado ou desalinado.
Esta interpretación pode guiar:
• axuste do agarre
• planificación do movemento
• resposta de seguridade
Dentro deste contexto de ciclo pechado, a detección táctil serve como parte da lóxica de control activo en lugar de como un canal de medición pasivo. Os sistemas máis sólidos son, polo tanto, a miúdo orientados á tarefa. Non intentan detectar cada variable con igual énfase. En cambio, concentranse na información que máis directamente apoia unha acción estable, informada e técnicamente defendible.
Comprensión máis ampla dos seus principais roles
Os principais roles dos sensores táctiles van moito máis aló da simple detección de toque. A un nivel máis profundo, apoiánse na comprensión física estructurada a través da detección en capas, do procesamento de sinais e da interpretación. A detección captura os feitos observables do contacto. O recoñecemento explica o que eses feitos suxiren sobre o obxecto e a interacción. Entre estas dúas capas atópase o desafío de enxeñaría máis amplo da intelixencia táctil: reter información físicamente útil mentres se converte en coñecemento acionable. Un sistema táctil ben deseñado destaca non porque produza máis datos, senón porque converte o contacto en xuízo sonoro con suficiente rapidez, precisión e fiabilidade para apoiar a interacción no mundo real.
Evolución dos Sensores Táctiles e Expansión Técnica

Sensores Táctiles nos anos 70
A investigación sobre sensores táctiles avanzou lentamente durante os anos 70, cando os sistemas de robótica estaban principalmente deseñados para determinar se se produciu contacto e para estimar a magnitude da forza aplicada. A maioría dos sistemas táctiles dese período centrábanse en responder a estas dúas preguntas básicas. Esta limitación reflectía a situación máis ampla da tecnoloxía en robótica na época. As arquitecturas de control eran relativamente sinxelas, os recursos computacionais eran limitados e a integración mecánica a miúdo presentaba maiores desafíos que os elementos sensoriais en si.
Como resultado, os primeiros sensores táctiles típicamente presentaban baixa resolución espacial, sensibilidade limitada, curta vida útil e rendemento inestable en condicións de carga repetida. Aínda que estes dispositivos podían apoiar operacións básicas relacionadas co contacto, rara vez proporcionaban a consistencia necesaria para tarefas de manipulación delicada ou operación en ambientes inciertos. Moitos experimentos de enxeñaría temperáns revelaron que o desafío se estendía máis aló da detección de presión. Os enxeñeiros tamén tiñan que manter a fiabilidade da calidade da sinal a pesar da deformación repetida, das fluctuacións de temperatura e do desgaste da superficie. Esta experiencia estableceu un principio importante que continua a influenciar o desenvolvemento de sensores táctiles hoxe: a detección táctil útil require avances simultáneos na calidade da sinal, na conformidade mecánica e na robustez do sistema. Ao longo da historia do campo, este equilibrio a miúdo distinguiu os sistemas prácticos exitosos dos prototipos prometedores de laboratorio.
Tecnoloxías de Detección nos anos 80
Durante os anos 80, a investigación sobre sensores táctiles entrou nun período de desenvolvemento moito máis rápido. Os investigadores expandiron o seu traballo máis aló de dispositivos de principio único e comezaron a investigar unha gama máis ampla de tecnoloxías de detección, incluíndo enfoques resistivos, capacitivos, piezoeléctricos, ópticos, ultrasonidos, térmicos e magnéticos. Esta diversificación produciuse porque cada mecanismo de detección ofrecía vantaxes singulares ao mesmo tempo que introducía as súas propias limitacións. A miúdo, os enxeñeiros tiñan que equilibrar requisitos concorrentes relacionados coa sensibilidade, ancho de banda, flexibilidade estrutural, inmunidade ao ruído, complexidade de fabricación e custo.
Os sensores táctiles resistivos eran xeralmente simples de fabricar e integrar en sistemas maiores, pero a deriva a longo prazo podía reducir a fiabilidade das medicións. Os sensores capacitivos ofrecían alta sensibilidade e baixo consumo de enerxía, ainda que requirían blindaxe coidadosa e circuitos electrónicos de soporte estables. Os sensores piezoeléctricos respondían de maneira efectiva a forzas cambiantes, pero eran menos adecuados para medir cargas estáticas. Os sensores táctiles ópticos ofrecían alta resolución e unha fuerte resistencia á interferencia electromagnética, pero a miúdo requirían estruturas de empaquetado máis complicadas. A medida que a investigación avanzaba, tornábase cada vez máis claro que ningún principio de detección único podía satisfacelo todo. As estratexias de deseño prácticas, polo tanto, desplazáronse cara á selección de tecnoloxías de detección baseadas nos requisitos da tarefa en lugar de buscar unha solución universal.
Procesamento de Datos Táctiles e Exploração Activa
Nos anos 80 tamén se viu un progreso significativo no procesamiento de datos táctiles e na exploración táctil activa. Este desenvolvemento representou un cambio importante na forma en que os investigadores avaliaban o rendemento da detección táctil. A efectividade dun sistema táctil xa non se determinaba unicamente polas propiedades dos materiales ou polo deseño do transdutor. O rendemento dependía cada vez máis de como se procesaba e interpretaba a información táctil durante a interacción co ambiente.
A automatización industrial xogou un papel importante na conducción desta transición. Esperábase que os robots detectaran o escorregamento, estimaran as condicións de contacto, identificaran as características da superficie e axustaran a forza de agarre en tempo real. A través do despregamento práctico, os investigadores descubriron repetidamente que as señales táctiles brutas contiñan un significado limitado por si mesmas. A información valiosa emerxeu só despois da calibración, filtrado, extracción de características e análise específica de tarefas. Como consecuencia, a historia da percepción táctil converteuse non só nunha historia de hardware mellorado senón tamén nunha historia de transformar as medicións de contacto en información de control útil.
Imaxes táctiles e percepción integrada nos anos 90
Nos anos 90, a investigación de sensores táctiles ampliou a súa amplitud, volviuse máis sistemática e cada vez máis interdisciplinaria. A atención desprazouse desde elementos de percepción individuais cara a marcos de percepción completos que incorporaban arquitecturas de sensores, imaxes táctiles, recoñecemento de formas, percepción activa e sistemas robóticos integrados. Durante este período, a percepción táctil tamén madurou conceptualmente. En lugar de ser vista como un componente auxiliar engadido ao final do desenvolvemento do sistema, a percepción táctil comezou a ser recoñecida como un canal de percepción independente coas súas propias características espaciais, dinámicas temporais e importancia funcional.
A imaxe táctil permitiu que a información de contacto distribuída se representase nunha forma similar aos datos visuais. Esta capacidade abriu novas oportunidades para o recoñecemento de patróns e a caracterización de obxectos. A investigación no recoñecemento de formas demostrou ademais que a información táctil podía revelar detalles que os sistemas visuais a miúdo tiñan dificultades para obter. Estas vantaxes tornáronse particularmente evidentes cando os obxectos estaban ocultos, eram deformables, reflectantes, submersos ou localizados en ambientes confinados. A experiencia práctica mostrou consistentemente que cando a información visual se volvía non fiable, a información táctil a miúdo se volvía máis valiosa. Como resultado, a percepción táctil movedesuse gradualmente dun papel de apoio cara a unha posición máis central na manipulación e percepción robótica.
Aplicacións médicas de sensores táctiles nos primeiros anos 2000
Os primeiros anos 2000 presentaron outra gran transición, xa que a percepción táctil se expandiu a aplicacións médicas e de campo. Este cambio reflectiu tanto melloras tecnolóxicas como un crecente recoñecemento da importancia do retroalimentación táctil en entornos operativos esixentes.
En 2002, os sensores táctiles foron integrados en catéteres utilizados para cirurxía endoscópica para estimar a rigidez dos tecidos e reducir o risco de aplicar forza excesiva. Este desenvolvemento foi particularmente significativo porque os procedementos pouco invasivos limitan o retroalimentación táctil directo e require que os cirurxiáns confíen moito na información indirecta. Mesmo a restauración parcial da sensación táctil mellorou a seguridade e precisión do procedemento.
En 2003, un equipo de investigación japonés desenvolveu un sensor táctil piezoeléctrico tridimensional para un dedo robótico e aplicouno a unha interface de simulación de fígado utilizada no adestramento cirúrxico mínimamente invasivo. Este traballo demostrou que a percepción táctil podía apoiar non só a manipulación directa senón tamén a simulación, adestramento e desenvolvemento de habilidades. Interfaces táctiles ben deseñadas axudaron aos usuarios a distinguir variacións sutís de forza e reduciron o tempo necesario para adaptarse a procedementos complexos.
Percepción táctil para robótica subacuática e de campo
En 2009, investigadores alemanes implementaron un sistema de percepción táctil nun robot subacuático inspirado nun polbo, permitindo unha detección de obstáculos máis autónoma e exploración do fondo mariño. Este proxecto ilustróu o valor estratéxico da percepción táctil en entornos onde a visibilidade é limitada, as condicións de iluminación son malas ou a calidade da auga interfire cos sistemas ópticos. Nesas situacións, o tacto pode converterse nunha das fontes de información ambiental máis fiables.
Desde a detección de contacto ata a percepción intelixente
Tomada como un todo, a evolución da percepción táctil demostra unha clara progresión desde a detección básica de forzas cara a sistemas de percepción sofisticados capaces de apoiar o control en bucle pechado en ambientes complexos. O significado máis profundo desta evolución non reside só na expansión das aplicacións senón tamén nas cambiantes expectativas colocadas sobre as tecnoloxías de percepción táctil.
A percepción táctil evoluíu de ser un detector de contacto pasivo a converterse nunha interface activa entre máquinas e o seu arredor. Os avances máis significativos produciron cando os investigadores recoñeceron o tacto como un canal de percepción único en vez de simplemente un substituto da visión. A información táctil pode revelar propiedades como a rigidez, a textura, o deslizamento, a xeometría local e a intención de interacción. Mirando cara o futuro, o progreso futuro probablemente dependerá menos de melloras illadas na sensibilidade e máis da integración de materiais avanzados, deseño mecánico, interpretació da sinal e estratexias de control dentro de marcos de perceptión unificados. A historia do campo xa demostrou o valor de mellores sensores. Igualmente importante, con todo, é a crecente comprensión de que a mellora na interpretación da interacción ten a miúdo un impacto aínda maior no rendemento do sistema.
Clasificación de Sensores Táctiles
Os sensores táctiles poden ser interpretados desde perspectivas tanto amplas como estreitas.
No senso amplo, implican a percepción do tacto, presión, forza, deslizamento, temperatura, textura superficial e vibración.
No senso estreito, centranse na interacción mecánica formada na interface de contacto entre un sistema robótico e un obxecto externo.
Desde un punto de vista de enxeñaría, a visión máis estreita é a miúdo máis directa porque alinea os obxectivos de medición co agarre, a manipulación, a regulación de contacto e o control de movemento. Esta distinción pode parecer subestimada a primeira vista, pero con frecuencia despexa o desorde conceptual e axuda a manter as discusións de deseño centradas en comportamentos medibles.
Un camiño de clasificación máis usable vai máis aló da función soa e tamén considera o principio físico que converte os eventos de contacto en sinais medibles.
Os grupos funcionais comúns inclúen sensores de contacto, sensores de forza-momento, sensores de presión e sensores de deslizamento.
Estes grupos seguen sendo informativos, pero as súas fronteiras a miúdo se difuminan na implementación real. Unidade de sensado pode responder a forza normal, forza tangencial e deslizamento anticipado dentro da mesma interacción. Por esa razón, a clasificación por metode de transdución con frecuencia proporciona unha estrutura técnica máis limpa. Aclara non só que detecta un sensor, senón tamén como se comporta baixo ruído, carga sostida, límites de empaquetado, presión de calibración e restricións de integración a nivel de sistema. No traballo de enxeñaría real, esta segunda capa de clasificación a miúdo resolve debates que as etiquetas puramente funcionais deixan sen resolver.
Vista Funcional dos Sensores Táctiles
Desde unha perspectiva funcional, os sensores táctiles normalmente son agrupados pola cantidade física ou evento que se espera que capturen.
Sensores de Contacto
Os sensores de contacto determinan se se produciu contacto físico entre unha superficie de detección e un obxecto. A súa saída pode ser binaria ou basearse en limiares, pero esa retroalimentación aparentemente modesta a miúdo establece o ton para toda a secuencia de interacción. No agarre robótico, unha simple sinal de contacto pode limitar a forza de peche excesiva, reducir o dano relacionado coas colisións e apoiar a lóxica de control activada por eventos. Moitos sistemas operativos comezan cunha detección de contacto fiable antes de avanzar cara a estimación de forza máis elaborada.
A implementación práctica revela repetidamente a mesma lección: cando o primeiro contacto se detecta demasiado tarde, ou cando a sinal chega con demasiado ruído, o control descendente volve máis difícil de establecer. Os enxeñeiros tendan a sentir rápido este problema, porque incluso un controlador ben axustado perde a compostura cando a primeira pista física é vaga.
Sensores de Forza-Momento
Os sensores de forza-momento miden forzas e torques que actúan na interface de contacto. Sirven para situacións nas que un sistema debe facer máis que confirmar o contacto; tamén debe interpretar dirección, magnitude e efecto rotacional. Esta capacidade apoia a manipulación hábil, a montaxe compliant e o uso de ferramentas.
A súa contribución reside en axudar a un robot a axustar a postura, agarre e movemento cando as cargas cambian de maneiras sutís. Na práctica, a precisión da forza soa raramente conta toda a historia.
Transformación de coordenadas estable, baixo acoplamento entre eixos, montaxe repetible.
Estes factores a miúdo dan forma ao rendemento global tan forte. Os deseñadores experimentados normalmente aprenden isto con algo de frustración, porque as especificacións elegantes dos sensores poden perder moito do seu atractivo unha vez que a inconsistencia na montaxe comeza a distorsionar os datos.
Sensores de Pressión
Os sensores de presión capturan a distribución espacial da carga normal a través dunha área de contacto. Isto fainos ben compatibles con arrays táctiles, pel artificial, avaliación de agarre e estimación da forma do obxecto. A mapeo de presión proporciona máis que unha magnitude de forza neta.
• Mostra onde se concentra a carga.
• Mostra como a carga se traslada co tempo.
• Mostra se o patrón de contacto presente suxire un mantemento estable ou sobrecarga local.
En moitas tarefas de manipulación, a información de presión distribuída di máis que un único valor de forza resultante, porque o contacto real raramente ocorre nun punto idealizado. Esa é unha razón pola que as densas matrizes de presión seguen atraendo atención, incluso cando as esixencias de cableado e procesamento de sinais poñen á proba a paciencia do equipo de deseño.
Sensores de Deslizamento
Os sensores de deslizamento detectan o movemento relativo, ou o comezo do movemento, entre a superficie de contacto e un obxecto. O seu papel convértese especialmente significativo porque un agarre exitoso depende non só da aplicación de forza, senón tamén de notar cando esa forza xa non é suficiente. A detección temprana de deslizamento ofrece ao sistema de control a oportunidade de aumentar o agarre antes de que ocorra a perda completa do obxecto.
En entornos prácticos, as sinais de deslizamento máis útiles son a miúdo aquelas que expoñen micro-movemento xusto antes do fallo visible. As sinais que simplemente confirman o deslizamento despois de que sexa obvio son moito menos útiles. Ese breve período de transición carga cun peso inusual na manipulación, e moitos enxeñeiros desenvolven un respectuoso aprecio por el despois de ver como agarres doutro xeito prometedores fallan nunha fracción de segundo.
Clasificación por Método de Transdución
A clasificación funcional describe o obxectivo de detección, mentres que a clasificación baseada na transdución explica o mecanismo interno que xera a sinal. Para as decisións de deseño, este enfoque é a miúdo máis revelador porque influén directamente na sensibilidade, linealidade, robustez, custo, capacidade de manufactura e compatibilidade co hardware robótico. Tamén ofrece unha imaxe máis sincera de que esixirá un sensor despois da fase de prototipo, cando o optimismo normalmente se topa coa disciplina da integración.
Sensores Táctiles Piezoresistivos
Os sensores piezoresistivos operan cambiando a resistencia eléctrica baixo carga mecánica aplicada. Son amplamente utilizados porque o principio é sinxelo, a electrónica é comparativamente simple e o custo pode permanecer modesto. Tamén se adaptan ben á integración de matriz, o que os fai atractivos para peles táctiles de gran área e superficies de mapeo de presión.
O seu reclamo máis forte reside na praticidade. Son relativamente fáciles de fabricar, conectar e escalar en moitas aplicacións. Esa comodidade explica por que aparecen tan a miúdo en prototipos e conceptos comerciais. Ao mesmo tempo, os seus inconvenientes non se poden ignorar.
Deriva de resistencia, histeresis, sensibilidade á temperatura, fatiga material a longo prazo.
Estes efectos poden reducir a fiabilidade da medición. Baixo carga repetida, a sinal pode desprenderse mesmo cando a forza aplicada non cambia. Isto é máis que unha molesta teórica menor; a miúdo crea cargas de calibración e fai que o control de forza en lazo pechado sexa menos predecible co tempo.
A experiencia de implementación tende a apontar na mesma dirección: os sensores piezoresistivos funcionan mellor cando o deseño recoñece as súas imperfeccións de forma temprana.
Selección de material, estratexia de compensación, rutina de recalibración.
Estas opcións de deseño adoitan importar máis que as características estáticas idealizadas sobre papel. Esa conclusión non é glamorosa, pero é a miúdo onde comeza o xulgamento de enxeñaría duradeira.
Sensores Táctiles Ópticos
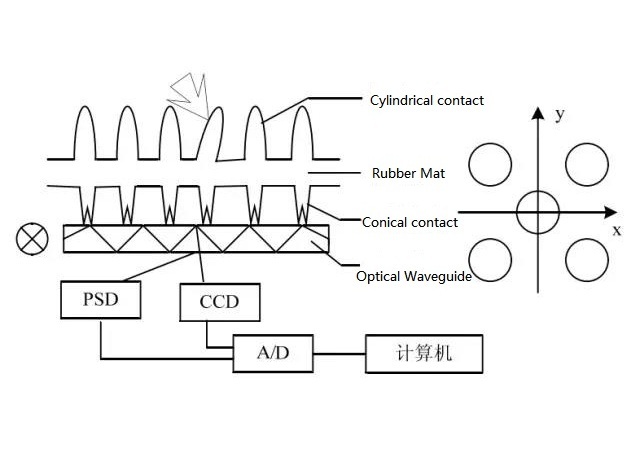
Os sensores táctiles ópticos detectan deformación ao medir cambios na intensidade da luz, no camiño da luz, na reflexión, na refracción ou en características da imaxe dentro da estrutura de detección. Debido a que o principio de detección está separado da lectura de deformación eléctrica directa, estes sensores poden ofrecer unha forte inmunidade á interferencia electromagnética e poden proporcionar rica información espacial.
A súa vantaxe máis sorprendente é a densidade de información. Os métodos ópticos poden capturar a geometría de contacto detallada, campos de deformación e, en algúns deseños, patrones relacionados co corte. Isto fainos altamente valiosos para o recoñecemento de obxectos, caracterización de superficies e manipulación fina. En sistemas avanzados, a detección táctil óptica pode funcionar case como imaxe de capa de contacto, dando aos enxeñeiros un nivel de detalle que é difícil de descartar unha vez que o viron funcionar ben.
O intercambio está na complexidade estrutural.
Encaixado coidado, iluminación controlada, alineación precisa, procesamiento de imaxes ou sinais non trivial.
Estas demandas non son incidentais. O rendemento pode decaer cando o camiño óptico interno cambia, cando o elastómero envellece ou cando os contaminantes alteran o comportamento reflectante. No uso real, un concepto que parece elegante no laboratorio pode volverse teimosamente difícil como produto, en gran medida porque a robustez mecánica e a consistencia óptica son máis difíciles de preservar do que se esperaba. Por iso, a detección táctil óptica tende a ser máis persuasiva cando a rica percepción compensa xenuinamente a carga adicional do sistema.
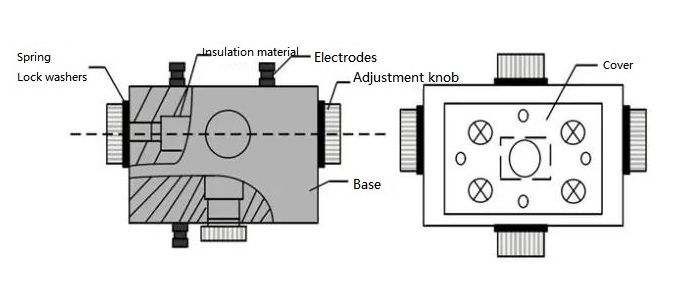
Sensores Táctiles Capacitivos
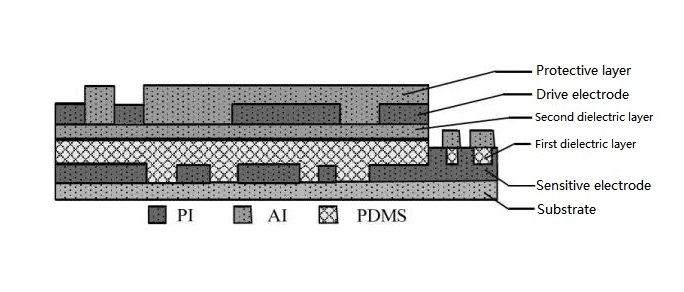
Os sensores táctiles capacitivos miden a forza ou a presión a través de cambios na capacitancia provocados polo desprazamento dos electrodos, variación da área de contacto ou deformación dieléctrica. Son coñecidos pola alta sensibilidade, baixo consumo de enerxía e forte capacidade de resposta. Para a medición táctil refinada, a miúdo se lles ve con considerable optimismo.
Un gran mantemento da detección capacitiva é que pequenos cambios estruturais poden producir respostas eléctricas mensurables. Isto apoia a detección de toques lixeiros e variacións sutís de presión, que son altamente útiles na interacción compliant e no agarre delicado. As estructuras capacitivas tamén se poden elaborar finas e flexibles, facéndoas ben adecuadas para superficies de detección distribuídas.
Ao mesmo tempo, estes sensores son vulnerables a varias perturbacións.
Capacitancia parasitaria, ruído ambiental, efectos da humidade, interferencia electromagnética.
Estes factores poden introducir inestabilidade ou variacións falsas, especialmente en arrays densos e montaxes robóticas compactas onde as liñas de sinal están apertadas. Na práctica, o rendemento útil a miúdo é decidido pola disciplina de implementación en lugar de só pola teoría.
Blindaxe, aterramento, disposición do circuíto, arquitectura de lectura.
Estes aspectos frecuentemente determinan se a sensibilidade esperada se converte en datos fiables. Moitos equipos descubren que a detección capacitiva parece enganosamente simple a nivel de principio, pero despois convértese en moito máis esixente durante a integración.
Sensores Táctiles Magnéticos Conductivos
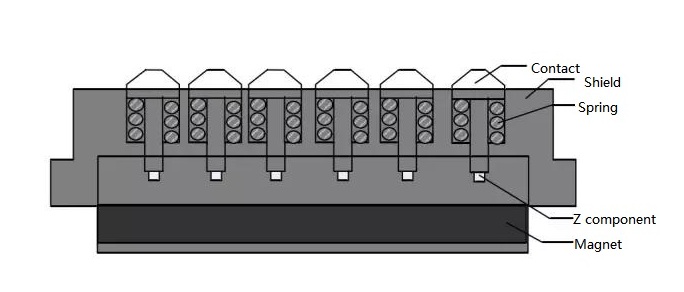
Os sensores táctiles magnéticos conductivos converten cambios inducidos por forza na distribución do campo magnético en saída eléctrica. As súas estruturas a miúdo combinan un medio deformable, elementos magnéticos e compoñentes sensibles ao campo, como dispositivos Hall ou elementos magnetoresistivos. Este método pode apoiar deseños compactos, sensibilidade práctica e, en alguns casos, boa tolerancia ao desgaste mecánico na interface eléctrica.
Unha característica atractiva é que a deformación mecánica non sempre require contacto eléctrico directo no punto de medición. Isto pode mellorar a durabilidade e ampliar as opcións de deseño estrutural. Os métodos magnéticos tamén poden soportar detección multidireccional cando o campo magnético se forma e mide intencionalmente a través de múltiples eixos.
Aínda así, estes sensores son menos comúns en plataformas robóticas convencionais. As razóns van máis alá do rendemento de detección únicamente.
Perturbación magnética externa, restricións de embalaxe, dificultade de calibración, historia limitada de estandarización industrial.
Todos estes factores infl úen na súa difusión. Aínda así, esta clase a miúdo recibe menos atención do que merece. Cando se necesitan indicios de forza tridimensional compactos e as condicións ambientais permanecen manexables, a detección magnética pode ofrecer unha ruta equilibrada entre a simplicidade estructural e unha información máis rica. É o tipo de opción que pode non dominar as discusións ao principio, pero que pode converterse sorprendentemente convincente na aplicación adecuada.
Sensores Táctiles Piezoeléctricos
Os sensores táctiles piezoeléctricos xeran carga eléctrica cando están sometidos a tensión mecánica. Son especialmente efectivos para a detección de forzas dinámicas porque responden rapidamente e poden producir altas saídas de sinal-ruído durante eventos transitorios. Isto faíos ben axeitados para a detección de impactos, detección de vibracións, eventos relacionados coa textura e monitorización de cambios de contacto rápidos.
A súa limitación é igualmente familiar: normalmente non son ben axeitados para a medición de forza estática porque a carga xerada tende a descompoñerse co tempo. Como resultado, destacan na detección de cambios, pero non manteñen un valor estable con gracia baixo carga constante. Esta característica non debilita a tecnoloxía por defecto; simplemente define onde o método se desempeña con confianza e onde non.
Algúns dos deseños máis fortes emerxen cando esta natureza dinámica se considera como unha característica deliberada. Nos sistemas de manipulación, os elementos piezoeléctricos son máis efectivos cando se combinan cunha modalidade de detección diferente. Pódense capturar eventos rápidos que sensores máis lentos ou propensos ao deriva puideran perder. Neste sentido, encaixan de forma natural nas arquitecturas táctiles híbridas, onde a información estática e dinámica se separa en lugar de forzarse a un único canal comprometido.
Direccións de Enxeñaría Predominantes no Desenvolvemento de Sensores Táctiles
O traballo histórico e contemporáneo a través destas categorías de sensores apunta a varias direccións recorrentes.
Detección Multidireccional
A detección táctil moderna está pasando máis aló da simple detección de forza normal cara á medición simultánea da forza normal, forza de corte, par e movemento relacionado cos escorregamentos.
Forza normal, forza de corte, par, movemento relacionado cos escorregamentos.
Este cambio reflicte unha comprensión máis profunda da manipulación. O contacto real é intrínsecamente multidimensional. Un sensor que mide só un compoñente pode seguir sendo útil, pero non pode describir completamente como se está mantendo, empurrando, torcendo ou soltando un obxecto. A medida que as tarefas de manipulación se fan máis hábiles, a percepción multidireccional semella menos un refinamento opcional e máis unha resposta natural á realidade física.
Densidade de Array Maior
Outra dirección visible é o desenvolvemento de arrays táctiles máis densos. A maior densidade mellora a resolución espacial e permite que unha superficie de percepción capture detalles máis finos da distribución do contacto, localización dos bordos, deformación local e pistas de textura.
Distribución de contacto, localización dos bordos, deformación local, pistas de textura.
Con todo, unha maior densidade tamén aumenta a complexidade do cableado, as demandas de lectura, o risco de interferencia e a carga de procesamento de datos. Isto crea un compromeso de enxeñería familiar: máis datos non se convierten automaticamente en información máis útil a menos que a electrónica e os algoritmos de posteriori estean preparados para absorbela de forma eficiente. Quen traballou na integración de arrays densos xeralmente desenvolve sentimentos encontrados aquí, porque o atractivo de datos máis ricos a menudo chega xunto cun aumento agudo na carga do sistema.
Integración do Sistema Máis Estrita
Os sensores táctiles son cada vez máis deseñados como partes de sistemas robóticos completos en lugar de como compoñentes illados.
Cumprimento mecánico, acondicionamento de sinal, procesamento embebido, política de control, montaxe estrutural.
Estes elementos están agora máis estreitamente vinculados. Isto reflicte un cambio máis amplo no xuízo de enxeñería. Un sensor táctil gaña valor non só pola súa sensibilidade bruta, senón pola súa capacidade de mellorar o comportamento no nivel do sistema. Moitos deseños fallan non porque o principio de percepción sexa débil, senón porque o sensor, controlador e estrutura mecánica foron desenvolvidos como se pertencese a mundos separados. Esa desconexión é fácil de subestimar durante o desenvolvemento do concepto e difícil de perdoar unha vez que o sistema atinge a plena operación.
Unha Visión Fundamentada da Selección de Sensores
Ningún método de percepción táctil é universalmente superior. Cada tecnoloxía representa un equilibrio diferente entre sensibilidade, robustez, resposta temporal, capacidade de fabricación, resolución espacial e carga de integración. A elección máis adecuada depende da tarefa obxectivo, do ambiente operativo e da arquitectura de control circundante.
• Para a percepción distribuída de grandes áreas e baixo custo, os enfoques piezorresistivos permanecen moi atractivos.
• Para a imaxe de contacto de alta resolución, os métodos ópticos a miúdo proporcionan maior poder expresivo.
• Para a medición de toque estático ligera e sensible, os sensores capacitivos siguen sendo convincentes cando a interferencia se mantén controlada.
• Para a detección de eventos dinámicos, a percepción piezoeléctrica mantén unha clara vantaxe.
• Para a percepción multidireccional compacta en condicións ben xestionadas, os enfoques magnéticos ofrecen opcións prometedoras.
Un principio de selección práctica é elixir o método de percepción de acordo co modo de falla que máis importa. Se a principal preocupación é perder pequenos contactos estáticos, unha clase de sensor destacará. Se a principal preocupación é non detectar deslizamentos rápidos ou impactos, outra clase terá máis sentido. Esta perspectiva a miúdo conduce a mellores resultados de deseño que seleccionar un sensor só por sensibilidade máxima ou pola popularidade en investigación publicada. Pide unha conversación máis honesta coa aplicación, e esa honestidade normalmente paga a pena.
A clasificación dos sensores táctiles non é meramente un exercicio de nomear categorías. Exprime a relación entre o contacto físico, a xeración de sinais e a función robótica. A clasificación funcional explica que tipo de información de contacto se busca. A clasificación baseada na transdución explica como se obteñen físicamente esa información e que compromisos técnicos acompañan a isto.
A dirección máis ampla do campo suxire que os futuros sistemas táctiles dependerán menos do rendemento illado dos sensores e máis de estratexias de percepción integrada.
Múltiples mecanismos, percepción espacial densa, compatibilidade directa cos sistemas de control.
Dentro deste contexto, o sensor táctil máis eficaz a miúdo non é o que ten a especificación independente máis impresionante, senón o que preserva unha intelixencia de contacto fiábel en condicións de operación reais. Esa conclusión pode soar contida, pero continúa separando conceptos pulidos dos sistemas nos que os enxeñeiros poden confiar cando o traballo deixa de ser teórico.
Aplicacións dos Sensores Táctiles
Os sensores táctiles progresaron ben máis aló da detección básica de presión e agora soportan unha ampla gama de funcións avanzadas en próteses, automatización industrial e electrónica vestible. A súa contribución non se limita a identificar o contacto. Converten a interacción física en información que pode ser interpretada con consistencia, sobre a que se pode actuar con confianza, e que se alinea cos requisitos das condicións operativas reais. En sistemas aplicados, o seu valor práctico emerxe cando as sinais brutas son traducidas en xuízos aplicables.
• Que tan firmemente agarrar
• Cando parar o movemento
• Como distinguir o contacto seguro da forza nociva
• Como devolver unha retroalimentación significativa ao usuario
Como resultado, o campo xa non está moldeado só pola sensibilidade. Agora está cada vez máis dirixido pola interpretación de sinais, compatibilidade mecánica e integración a nivel de sistema.
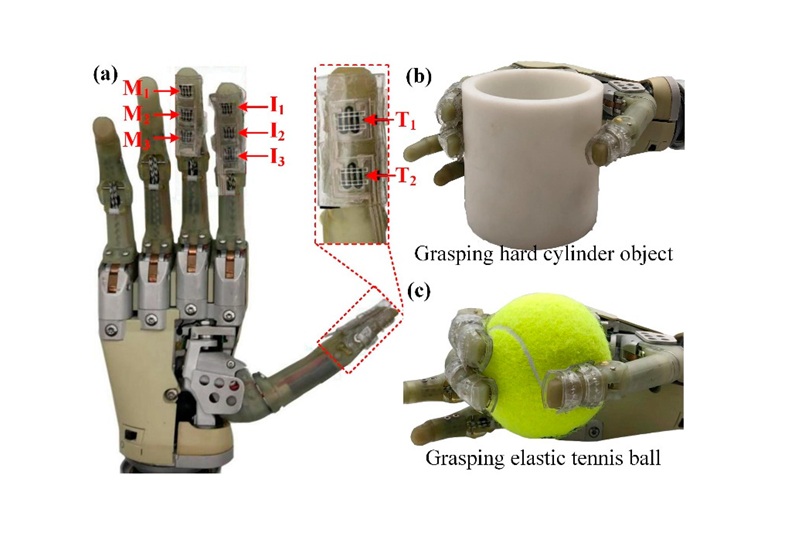
Sensores Táctiles en Sistemas Prótese
Na tecnología prostética, pídese aos sensores táctiles que fagan moito máis que rexistrar a forza exterior. O obxectivo máis profundo é recrear unha forma de tacto que o corpo humano poida interpretar con menos tensión e maior claridade intuitiva. A pel natural non describe o contacto mediante un valor ininterrompido. Depende de mecanorreceptores especializados que transforman a presión, a vibración e a textura en actividade neural basada en pulos. A sincronización e a frecuencia destes pulos transportan información en capas.
• Forma do obxecto
• Suavidade
• Deslizamento
• Magnitude da forza
Este principio biolóxico inflúe de forma constante na arquitectura dos sistemas de sensado prostético avanzados.
Os sensores táctiles artificiais tradicionais a miúdo producen cambios de voltaxe ou resistencia analóxicos. Aínda que tales saídas seguen sendo útiles para a medición, non están naturalmente alineadas co estilo de sinalización baseado en eventos do sistema nervioso. Por tanto, requireuse computación adicional para converter as saídas continuas en patróns semellantes a picos que sexan adecuados para a estimulación neural ou o control biomimético. Esta fase de tradución a miúdo decide se a retroalimentación se senta accesible ou mentalmente esixente para o usuario. Un sistema pode operar con precisión impresionante no laboratorio e, con todo, sentirse incómodo no uso diario se a súa retroalimentación chega tarde, fluctúa inesperadamente ou reduce a sensación a pistas sobresimplificadas.
Codificación Neuromórfica e Naturalidade Sensorial
A codificación neuromórfica xurdiu como unha dirección prominente porque intenta reducir a distancia entre o sensado artificial e a comunicación biolóxica. En lugar de centrarse só na magnitude da sinal, as estratexias neuromórficas enfatizan a estrutura temporal, a xeración de eventos escasos e a codificación adaptativa. Este enfoque pode reducir a carga de datos, acurtar o tempo de resposta e producir patróns de retroalimentación que se sintan máis próximos ao tacto natural. Una lección de deseño práctica volveuse cada vez máis clara: a naturalidade a miúdo depende menos de maximizar a complexidade e máis de preservar transicións significativas.
• Primeiro contacto
• Carga crecente
• Comezo do deslizamento
Durante tarefas de manipulación real, estas transiciones a miúdo levan máis valor operativo que os valores de forza estáticos por si mesmos.
A experiencia do uso prostético amosa repetidamente que os usuarios a miúdo prefiren unha retroalimentación estable e predecible sobre unha retroalimentación que teóricamente é máis rica pero máis difícil de interpretar. Alguén que intente soster un vaso de papel, abrochar unha camisa ou alzar un obxecto fráxil non recibe moito de detalles excesivos se ese detalle chega de forma inconsistente. O que demostra ser realmente útil é a información oportuna que reduce a posibilidade de esmagar, deixar caer ou axustar repetidamente o agarre. Por esa razón, moitos deseños exitosos enfatizan a codificación de baixa latencia, limiares de forza calibrados e pistas sensoriais repetibles.
Interfaces Flexibles e Integración Neural
Materiais flexibles e interfaces suaves son amplamente utilizados porque os sistemas prostéticos deben interactuar con superficies curvadas, xuntas móbiles e tecidos biolóxicos sensibles. As plataformas de sensor ríxidas poden ofrecer precisión, pero a miúdo traen malestar, concentración de tensión localizada e conformidade debil a longo prazo. As capas táctiles flexibles, os elastómeros condutivos e as interconexións elásticas melloran o emparellamento mecánico e permiten que as superficies de sensado sigan funcionais durante a flexión e a deformación repetida. Esta compatibilidade mecánica afecta non só ao confort, senón tamén á fiabilidade da sinal e á vida útil.
As interfaces neurais directas introducen outra capa de complexidade. Unha vez que a saída do sensor está destinada a nervios periféricos, vías espinais ou sistemas corticais, os enxeñeiros deben abordar varias demandas estreitamente vinculadas.
• Sincronización precisa
• Estimulación segura
• Estabilidade da interface a longo prazo
O desafío é, polo tanto, bidimensional. O sensor debe detectar eventos externos con precisión, e a interface debe presentar esos eventos nunha forma que o usuario poida aprender gradualmente e confiar con seguridade. Na práctica, a confianza crece cando a retroalimentación se mantén consistente en tarefas repetidas. Mesmo unha interface técnica sofisticada pode ser deixada de lado se as súas respostas cambian notablemente co suor, o movemento do conector ou o desgaste mecánico rutinario.
Barreiras Restantes na Adopción de Próteses
A pesar do progreso substancial, varias barreiras continúan ralentizando a adopción máis ampla.
• Biocompatibilidade a longo prazo
• Eficiencia energética
• Deriva de sinal
• Calibración individualizada
Outro problema persistente é que o tacto protésico adoita ser evaluado en condicións de proba controladas que non reflicten plenamente a vida diaria. O éxito no laboratorio con obxectos estándar non se estende automáticamente a superficies húmidas, temperaturas cambiante ou movementos rápidos e non planificados. Una estratexia de desenvolvemento máis madura debería incluir a diversidade de tarefas do mundo real desde o principio en lugar de consideralo como algo que examinar só ao final.
Sensores Tactiles na Automatización Industrial
Na automatización industrial, a detección táctil fortalece o rendemento robótico ao engadir consciencia física na muñeca, pinza ou elemento final. Esta capa adicional de percepción permite que as máquinas fagan máis que seguir traiectorias xeométricas. Pódense adaptar ás condicións de contacto reais, axustar a forza durante a montaxe, detectar obstáculos inesperados e manexar partes delicadas con maior precisión. A medida que os ambientes de produción se volven máis rápidos e variables, a detección táctil é cada vez máis considerada parte dunha base de enxeñaría robusta en lugar de como un mellora opcional.
Unha ampla gama de tarefas industriais se beneficia da retroalimentación táctil.
• Montaxe robótica
• Inserción
• Polido
• Sujeción
• Inspección de superficie
Nas tarefas de inserción, por exemplo, a visión pode proporcionar unha alineación aproximada, pero o éxito final a miúdo depende de cambios sutiles de forza que revelan a dirección do contacto, a fricción ou o bloqueo. Na técnica de pulido ou eliminación de rebarbas, manter unha presión de contacto adecuada dá forma directamente á calidade da superficie e á lonxevidade da ferramenta. Na sujeción, a detección táctil axuda a detectar un deslizamento incipiente antes de que se perda un obxecto. Estes exemplos mostran que o tacto complementa a visión ao fornecer a realidade física local onde a información de liña de vista permanece incompleta ou ambigua.
Control en Bucle Pechado e Intelixencia de Contacto
Unha das contribucións máis claras da detección táctil na automatización reside no control en bucle pechado. Unha vez que a forza e a información de contacto están dispoñibles en tempo real, os robots poden axustar a rigidez, a velocidade e a trayectoria segundo o estado da tarefa. Isto apoia o axuste de conformidade, a detección de colisións e manipulación adaptativa. O efecto máis amplo é que a detección táctil transforma un robot de ser un executor programado previamente a convertirase nun sistema que responde físicamente.
Un patrón revelador dos entornos de despregamento é que moitos fallos de contacto non se deben á forza insuficiente do robot ou a unha planificación xeométrica deficiente, senón á falta de retroalimentación local. Unha pinza pode aplicar unha forza inadecuada non porque o controlador careza de capacidade, senón porque non ten unha indicación fiable do cambio de fricción, da desalineación da peza ou da deformación da superficie. Neste tipo de situacións, incluso unha capa táctil modesta pode mellorar o rendemento de maneira máis notable que un actuador máis forte. Isto suxire que un manexo de contacto máis intelixente a miúdo comeza cunha mellor detección antes de considerar mecánicas máis agresivas.
Seguridade e Interacción Humano-Robot
Na manufactura colaborativa, a detección táctil tamén mellora a seguridade. Os robots que detectan contacto inesperado rápidamente están mellor posicionados para limitar a forza do impacto, parar o movemento ou mudar a un comportamento de conformidade. Isto resulta especialmente relevante en espazos de traballo compartidos onde operadores e máquinas traballan a curta distancia. A seguridade neste entorno vai máis aló de detencións de emerxencia. Tamén inclúe a redución de casos de perigo, a limitación de colisións menores e a facilitación dunha cooperación máis fluída durante a entrega ou montaxe asistida.
Desde a perspectiva da enxeñaría, a dificultade radica en equilibrar a sensibilidade coa robustez. Os sensores deben detectar un contacto significativo sen acender falsas alarmas constantes provenientes de vibracións, zumbidos de ferramenta ou variacións normais do proceso. Nas liñas de produción reais, os sistemas excesivamente sensibles poden resultar frustrantemente imprácticos porque interrumpen o fluxo de traballo e erosionan a confianza do operador. É por iso que os sistemas táctiles industriais efectivos combinan a lóxica de limiar, o filtrado e a interpretación específica da tarefa en lugar de confiar só na saída bruta do sensor.
Escalabilidade e Restricións de Ambientes Difíciles
Os ambientes industriais impoñen esixencias estrictas en durabilidade, estabilidade de calibración e custos de mantemento.
• Poeira
• Aceite
• Variación de temperatura
• Impactos repetidos
• Ruído electromagnético
Estes factores poden degradar gradualmente ou abruptamente o rendimiento dos sensores. Un sensor que se comporta ben nunha plataforma de investigación limpa pode ter dificultades nuns ciclos de fabricación de alta frecuencia. Por esa razón, a adopción industrial non só depende da capacidade de detección, senón tamén do empaquetado, selado, substituibilidade e transparencia diagnóstica.
A escalabilidade presenta outro desafío. Unha matriz táctil de alta resolución pode proporcionar datos excelentes, pero a súa atracción práctica diminúe se o mantemento é caro ou a integración con controladores existentes se volve pesada. En moitas instalacións, a solución preferida non é a que ten a saída de datos máis rica, senón a que continúa operando con mínima recalibración e menos sorpresas. A fiabilidade en condicións imperfectas segue sendo unha das sinais máis persuasivas da madurez en enxeñaría.
Sensores Táctiles en Electrónica Vestible
Na electrónica vestible, os sensores táctiles operan como capas de detección distribuída que controlan forza, temperatura, humidade, movemento e outras sinais ambientais ou fisiolóxicas. O seu papel está a expandirse desde a simple recollida de datos até a interacción sostida entre o corpo, o dispositivo e o ambiente circundante. Isto posicionou a detección táctil como un compoñente importante da pel electrónica, roupas intelixentes, dispositivos de rehabilitación e plataformas de monitorización da saúde.
O desenvolvemento de substratos flexibles e circuítos elásticos mellorou substancialmente o confort e a adaptabilidade dos sistemas vestibles. Varias clases de materiais son frecuentemente utilizadas porque combinan funcionalidade eléctrica cunha conformidade mecánica.
• Grafeno
• Nanotubos de carbono
• Óxido de cinc
• Polímeros condutores
• Metais líquidos
Estes materiais permiten que os sensores se dobran, estiren e adapten a superficies irregulares mentres manteñen a sensibilidade e a continuidade da sinal. A adaptabilidade mecánica é moi importante porque un dispositivo vestible debe funcionar baixo deformación constante en lugar de en condicións de laboratorio controladas e tranquilas.
Innovación de Materiais e Expansión Funcional
A innovación de materiais ampliou a detección táctil desde a detección de único parámetro até a percepción multimodal. Os dispositivos vestibles modernos están cada vez máis orientados a detectar múltiples tipos de sinais dentro dunha plataforma integrada.
• presión
• tensión
• calor
• humidade
• cambios bioquímicos
Isto permite unha interpretación máis rica da condición e o entorno do usuario. Por exemplo, os datos de presión soamente poden indicar contacto, mentres que a presión combinada con temperatura e humidade pode axudar a distinguir entre exercicio, estrés, exposición ambiental ou un mal axuste do interface.
Con todo, a sensibilidade multimodal tamén introduce nova complexidade. A medida que se engaden máis canais de detección, a interferencia de sinais convértese nunha preocupación seria. Un cambio de temperatura pode alterar unha sinal de presión, e a tensión mecánica pode alterar as vías eléctricas destinadas á detección de humidade. Isto significa que engadir funcións non mellora automaticamente o deseño. En moitos casos, a calidade do deseño xulgarase por como se illan, calibran e fusionan as diferentes modalidades.
Integración a Nivel de Sistema en Plataformas Vestibles
O deseño actual de dispositivos vestibles está cada vez máis centrado na integración de todo o sistema. Os sensores agora combínanse con unidades funcionais adicionais.
• Módulos de potencia
• Unidades de comunicación sen fíos
• Circuítos de procesamento de sinais
• Micro-actuadores para saída háptica ou resposta terapéutica
Este cambio reflicte unha verdade práctica: un sensor por si só non produce un sistema vestible que as persoas seguirán usando. O verdadeiro valor aparece só cando a detección, a computación, a transmisión e a retroalimentación operan como unha plataforma coordinada.
Na práctica, os problemas de integración adoitan emerxer antes que os límites da detección. Un dispositivo pode mostrar unha excelente sensibilidade, pero seguir sendo inconveniente debido ao volume da batería, transferencia sen fíos inestable, irritación da pel, ou perda de sinal durante o movemento. Por esa razón, os deseños vestibles máis convincentes adoitan mostrar moderación. Perseguen un rendemento equilibrado, operación de baixo consumo e conforto mecánico en lugar de perseguir métricas de picos illados. Un dispositivo que as persoas están realmente dispostas a usar todos os días adoita superar a un tecnicamente superior que acaba esquecido nun caixón.
Durabilidade e Desafíos de Uso a Longo Prazo
A dobradura, torsión, suor e exposición a variacións de temperatura repetidas crean un estrés acumulativo nos sistemas vestibles. A fatiga do material pode levar a varios camiños de degradación.
• Microfendas
• Delaminación
• Pérdida de condutividade
• Desviación na calibración
Ademais, a descoordinación entre as propiedades térmicas, mecánicas e eléctricas nos materiais en capas pode producir inestabilidade a longo prazo. Estes modos de fallo son especialmente difíciles porque poden permanecer ocultos durante ciclos de proba curtos, pero a miúdo determinan a vida útil real do produto.
A longo prazo, o rendemento debe ser tratado como un obxectivo de deseño temperán en lugar de como un elemento de verificación na fase final. Os dispositivos destinados ao uso diario requiren máis que unha sensibilidade inicial prometedora. Benefíciase de probas de fatiga aceleradas, avaliación da adhesión, estratexias de encapsulamento e algoritmos de compensación de derivación. Na práctica, a durabilidade a miúdo separa un prototipo atractivo dun produto que pode permanecer en servizo con menos compromisos.
Retos Transversais e Direccións Futuras
A pesar de que os próteses, a automatización e os dispositivos vestibles difiren nos obxectivos de aplicación, comparten varios desafíos fundamentais.
• Mellorar a fidelidade da sinal
• Reduzir o ruído e a interferencia
• Aumentar a durabilidade mecánica
• Reduzir o consumo de enerxía
• Alcançar unha integración máis estreita entre a percepción e a toma de decisións
En todas as tres áreas, o campo avanza cara a plataformas que son máis pequenas, intelixentes, suaves e máis autónomas.
Unha tendencia notable é o cambio da percepción pasiva á percepción activa. Os futuros sistemas táctiles non só gravarán a presión. Interpretarán o contexto, anticiparán os resultados da interacción e adaptarán o comportamento en tempo real. Isto pode implicar varias capacidades emerxentes.
• Computación de borde local
• Autocalibración
• Captura de enerxía
• Comunicación baseada en eventos
Os avances coa influencia máis ampla probablemente virán de arquitecturas que acurtan a distancia entre a percepción, o procesamento e a resposta.
Outra dirección importante é a operación autosuficiente. A medida que os dispositivos táctiles se volven máis distribuídos e móbiles, a dependencia de carga frecuente ou unidades de potenza voluminosas convértese nunha restrición cada vez máis grave. A electrónica de alta eficiencia enerxética, o almacenamiento flexible, a captura triboelectrica e os circuítos neuromórficos de baixo consumo probablemente desempeñarán un papel maior. Unha plataforma táctil convértese en moito máis práctica unha vez que pode permanecer fiable sen demandar atención constante do usuario.
O próximo gran avance é pouco probable que provexa só da sensibilidade, porque moitos sensores xa ofrecen suficiente sensibilidade para demostracións controladas. O punto de inflexión máis significativo chegará cando os sistemas táctiles unan a alta calidade da percepción coa durabilidade, interpretabilidade e integración perfecta nas tarefas cotidianas. O campo está a chegar a unha etapa na que o éxito será xulgado menos por se o tacto pode ser medido, e máis por se ese tacto pode ser utilizado de forma natural, continua e a gran escala.
Conclusión
Os sensores táctiles bridgan a brecha entre o contacto físico e a intelixencia da máquina ao converter as interaccións relacionadas co tacto en información significativa. A detección táctil efectiva depende non só da sensibilidade senón tamén da estabilidade da sinal, a calibración e a interpretación fiable en condicións reais de operación. A medida que a robótica, a automatización e os sistemas intelixentes continúan avanzando, os sensores táctiles seguirán sendo esenciais para mellorar o manexo de obxectos, a conciencia ambiental e a interacción segura entre o ser humano e a máquina.
Preguntas Frecuentes [FAQ]
1. Por que o recoñecemento táctil é a miúdo máis difícil que a detección táctil en sistemas robóticos?
A detección táctil céntrase na medición da información de contacto físico, como forza, presión, localización ou deslizamento. O recoñecemento é máis desafiante porque debe interpretar esas medicións para determinar as propiedades do obxecto, forma, dureza ou condición do agarre. A precisión do recoñecemento depende moito da calidade dos datos de detección, o que a fai máis sensible ao ruído, á deriva e ás condicións de contacto cambiantes.
2. Por que o desenvolvemento de sensores táctiles cambiou de mellora do hardware a procesamento de sinais e algoritmos de percepción?
A medida que a tecnoloxía de sensores madurou, os investigadores se deron conta de que as sinais táctiles brutas por si soas ofrecen un valor limitado. A información útil emerxe só despois da calibración, filtrado, extracción de características e interpretación. Este cambio levou a un maior énfase no procesamento de datos, permitindo a robots identificar superficies, detectar deslizamentos, estimar propiedades de obxectos e tomar decisións de control intelixentes en lugar de simplemente medir a forza.
3. Como melloran os sensores de deslizamento o rendemento de agarre robótico en comparación cos sensores de forza por si soas?
Os sensores de forza poden medir cantidade de forza que se aplica a un obxecto, pero non sempre indican se o obxecto comeza a moverse. Os sensores de escorregadura detectan o movemento relativo na superficie de contacto e poden identificar micro-escorregaduras antes de que un obxecto caia. Esta advertencia tempada permite ao sistema de control axustar a forza de agarre en tempo real e manter un agarre estable.
4. Por que non hai unha única tecnoloxía de sensación táctil que funcione mellor para cada aplicación?
Cada método de sensor implica diferentes compensacións. Os sensores pirez resistivos son custo-efectivos e fáciles de integrar, os sensores capacitivos ofrecen alta sensibilidade, os sensores ópticos proporcionan información espacial detallada, os sensores piezoeléctricos destacan na detección de eventos dinámicos, e os sensores magnéticos soportan a detección multidireccional. A mellor elección depende de factores como os requisitos de sensibilidade, as condicións ambientais, a durabilidade, o custo e as necesidades de integración do sistema.
5. Que factores impulsoan o desenvolvemento futuro da tecnoloxía de sensores táctiles?
Os futuros sistemas táctiles esperan centrarse na detección multidireccional, matrices de sensores de maior resolución, unha integración máis estreita cos sistemas de control, e unha interpretación de sinal máis intelixente. Desenvolvementos emerxentes como a computación en borda, a auto-calibración, a captura de enerxía e o procesamento neuromórfico buscan crear plataformas táctiles que poidan operar de maneira máis fiable, eficiente e autónoma en ambientes do mundo real.
Blog relacionado
-
Follada de datos Mosfet IRLZ44N, circuíto, equivalente, pinout
![Follada de datos Mosfet IRLZ44N, circuíto, equivalente, pinout]()
2024/08/28
O IRLZ44N é un MOSFET de potencia de canle N moi usado.Coñecido polas súas excelentes capacidades de conmutación, é moi adecuado para numerosas a... -
Cantos ceros nun millón de millóns de euros?
![Cantos ceros nun millón de millóns de euros?]()
2024/07/29
O millón representa 106, unha figura facilmente comprensiva en comparación con elementos cotiáns ou salarios anuais. Miles de millóns, equivalente... -
A temperatura da batería demasiado baixa, a carga parou.Como solucionalo?
![A temperatura da batería demasiado baixa, a carga parou.Como solucionalo?]()
2024/10/6
Os problemas de carga da batería do teléfono móbil son comúns pero pódense xestionar de xeito eficaz.A temperatura xoga un papel importante na ef... -
Guía completa do transistor BC547
![Guía completa do transistor BC547]()
2024/07/4
O transistor BC547 úsase habitualmente nunha variedade de aplicacións electrónicas, que van desde amplificadores de sinal básicos ata circuítos d... -
Unha guía completa para os multiplexores e o seu papel nos sistemas dixitais
![Unha guía completa para os multiplexores e o seu papel nos sistemas dixitais]()
2025/09/20
Os multiplexores son compoñentes en sistemas dixitais, deseñados para canalizar múltiples sinais de entrada nunha única liña de saída mediante s... -
Guía completa para SCR (rectificador controlado por silicio)
![Guía completa para SCR (rectificador controlado por silicio)]()
2024/04/22
Os rectificadores controlados por silicio (SCR), ou tiristores, xogan un papel fundamental na tecnoloxía de electrónica de poder debido ao seu rende... -
LR621, SR621SW, 364, AG1 Equivalentes e substitucións da batería AG1
![LR621, SR621SW, 364, AG1 Equivalentes e substitucións da batería AG1]()
2024/07/15
As baterías de botóns LR621 e SR621SW prevalecen en dispositivos electrónicos compactos como reloxos, xoguetes pequenos, calculadoras e teclas remo... -
CR2450 VS CR2032 Comparación: todo o que necesitas saber
![CR2450 VS CR2032 Comparación: todo o que necesitas saber]()
2025/09/15
As baterías de botóns como CR2450 e CR2032 alimentan moitos electrónicos cotiáns, desde reloxos e remotos ata dispositivos médicos e industriais.... -
Fundamentos dos circuítos op-amplificadores
![Fundamentos dos circuítos op-amplificadores]()
2023/12/28
No complexo mundo da electrónica, unha viaxe aos seus misterios invariablemente lévanos a un caleidoscopio de compoñentes do circuíto, tanto exqui... -
Comparando diferenzas e aplicacións NMOS e PMO
![Comparando diferenzas e aplicacións NMOS e PMO]()
2024/11/15
Comprender as diferenzas entre os transistores NMOS e PMOS é importante no deseño de circuítos eficientes.NMOs (N-Type Metal-óxido-semiconductor) ...




Partes quentes
- TPA3107D2PAPR
- 7MBI100U2E-060
- CL21B223KCFNNNG
- RC5061MT
- SY8009AAAC
- MX29LV160CBTC-90G
- 12065A2R4CAT4A
- AD7468BRMZ-REEL7
- EPF001-10
- QM10HA-H
- CSD16327Q3
- M29W640GB70NA6E
- KSZ8841-32MVL
- NCP1234AD65R2G
- ISL6521IBZ-T
- C0402C0G1C510J
- LXT980QC
- AGL030V5-VQG100
- GRM033R71E103KE14D
- TIGER560C-G
- IRMCK341TR
- ERJ-6ENF7151V
- CQ0603JRNPO9BN430
- CX28398G-26
- 35PX1000MEFC10X20
- ADUM7241ARZ
- 1MBI200NH-060
- 1-353080-3
- XC4VLX100-11FFG1513C
- MAX479CSD
- CGA3E2X8R1H103K080AD
- W83194BG-323
- CBS2002412-T
- VCA2614Y/250
- 5054061860
- AD7686CRMZRL7
- MAX701CPA
- PM50RVA060
- HD14069UBFP
- IXFN64N50PD2
- GRM1555C1H6R1BA01D
- T491B225M020AT4053
- B32672Z5105K000
- M83262G-13
- RJK1056DPB
- MTS7988LR-A-LF
- HG62F75R23FL
- PEB2056NV1.2
- TLP185-GB
- V48C6C75AL2